SPANISH Minex 2026 – Multimodal mapping into practice
The advanced mine warfare exercise ESP MINEX-26, organized and led annually by the Spanish Navy (Armada) began on April 27 in different scenarios in the Balearic Islands area.
More than 500 personnel from Spain, the United States, Greece, Italy, and Turkey were involved in the exercise. All participating units have sophisticated underwater detection systems, divers specialized in mine neutralization and autonomous underwater vehicles (AUVs), which complement the capabilities of the Minehunters.
IQUA Robotics (IQUA) participated in the exercise alongside with our customer, the University of the Balearic Islands (UIB). It is the second participation of the two institutions in collaboration with the Spanish Navy, an experience very enriching for the three parties.
Image 1. SPARUS II AUVs ready to be deployed. Image courtesy of University of the Balearic Islands (UIB).
The SPARUS II deployed for the missions was equipped with a Norbit MBES, a TKMS Altas SSS and a vision stereo system especially designed and developed by IQUA for the UIB. This unit is conceived to provide the scientific team of the UIB with multiple kinds of data that they may require for their research, which in this case, was used for a defence application.
Image 2. SPARUS II AUV in the configuration of ORAT, the AUV of the UIB.
During the experimentation in Palma de Mallorca, the team performed multiple missions in different testing scenarios based on real operation scenarios of the AUVs.
Multimodal pipe inspection
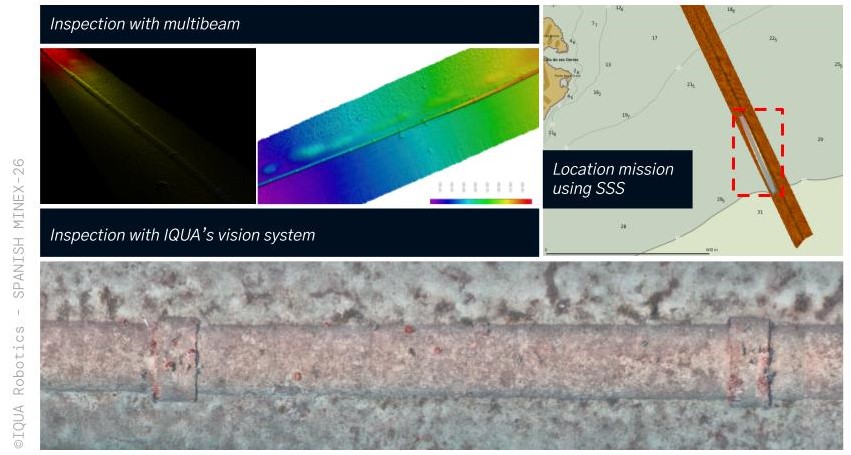
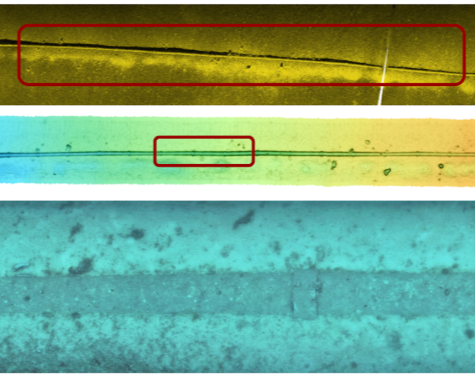
This scenario involved the detection and inspection of a pipeline at Cala Major bay, which was initially located using sidescan sonar. In a subsequent mission during the same deployment, the vehicle was commanded to inspect a specific portion of the pipe from a close distance, allowing it to acquire high-resolution multibeam and optical camera images.
Image 3. Results obtained in the pipeline inspection mission.
Multimodal mine detection and identification
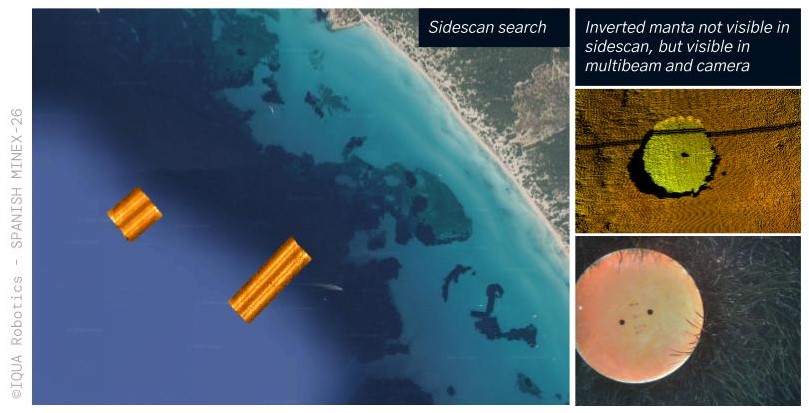
This scenario focused on using the AUV’s multimodal capabilities for target identification. The vehicle was deployed to confirm the presence of potential mines in known positions reported by other systems during the exercise. Due to the area being heavily covered by Posidonia oceanica (seagrass) meadows, sidescan sonar images struggled to reveal the presence of mines, however, the acquired bathymetric data and optical images successfully revealed the targets.
Image 4. Results obtained in the mine detection and identification mission.
Multimodal shipwreck mapping
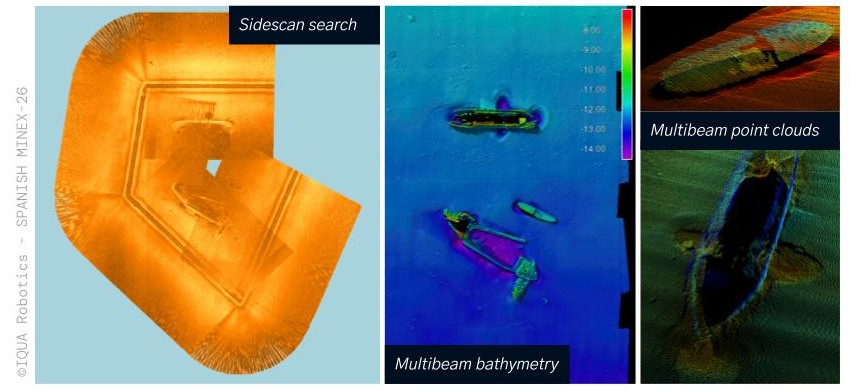
A third exercise was dedicated to underwater mapping of larger structures. This involved mapping three submerged shipwrecks located at a depth of 25 to 30 meters near the PortoPi harbour, utilizing first sidescan sonar and then high-resolution bathymetry to generate comprehensive 3D visualizations.
Image 5. Results obtained in the shipwreck mapping mission.
External Sources:
Illustrative image: ES MINEX-26 team. Image courtesy of the Spanish Navy.