REPMUS – Robotic Experimentation and Prototyping using Maritime Uncrewed Systems – exercise took place one more year in Lisbon’s southern coastal area during September 2025, hosted by the Portuguese Navy. With the participation of multiple NATO countries, this experimental setup allows different market stakeholders to test their technologies in several realistic scenarios.
For the fourth year in a row, IQUA Robotics participated in REPMUS25 at the invitation of the Spanish Navy. The company deployed its SPARUS II UUV in two key exercises: mine countermeasures (MCM) and critical underwater infrastructure (CUI). Besides, the team collaborated with the Spanish Navy, the US Navy and Thales Group to test interoperability capabilities in the framework of STANAG 4817.
Setup
This year, IQUA participated in REPMUS with SPARUS II equipped with a forward-looking sonar (FLS) from Blueprint Subsea, a multibeam echosounder (MBES) from Norbit, and a vision system developed by IQUA Robotics in the payload area.

Figure 1. Render of SPARUS II UUV configuration for REPMUS25
The vehicle used had the following advanced capabilities:
- Automatic target detection on low-frequency FLS images.
- Real-time planning of reacquisition trajectories upon a detection.
- Multimodal contact mapping: acoustic imaging with high-frequency FLS, 3D profiles with the multibeam sonar, and optical imaging of inspected contacts.
- Onboard generation of optical maps of inspections for rapid review at the end of a mission.
- STANAG 4817 for interoperability.
- Semi-automatic APP-11 report generation.
MCM scenario: detection, reacquisition and identification

Figure 2. SPARUS II UUV deployed in the MCM testing area
Motivation
Mine Countermeasure (MCM) operations are critical for ensuring the safety and freedom of navigation in both military and civilian maritime domains. Advanced MCM capabilities enable the detection, classification, and neutralization of these threats, reducing operational risk and protecting human lives and assets.
With the increasing complexity of mine designs and the expanding use of unmanned systems, there is a growing need for innovative technologies that combine efficient area coverage, accurate target identification, and rapid decision-making. Autonomous vehicles equipped with multimodal sensors and intelligent algorithms offer a transformative approach to MCM, enabling faster and more effective detection and classification of underwater threats.
Approach
IQUA Robotics’ SPARUS II vehicle tested its approach for mine detection and identification, by conducting multiple surveys in the designated naval mine warfare areas of REPMUS25 exercise.
The MCM approach is designed to combine detection and reacquisition in a single mission. For each task, a predefined survey trajectory was programmed to cover the area while scanning with the FLS at low frequency. An automatic detector was responsible for identifying potential contacts in the incoming FLS images, pausing the predefined trajectory, and replanning in real time a reacquisition maneuver to collect close-range data on the potential contact, including optical camera images, high-frequency FLS images, and multibeam profiles. After each reacquisition, the vehicle resumed the predefined path and continued scanning for additional potential contacts until the trajectory was completed. With this approach, by the end of the mission, the vehicle has collected all the necessary information to perform identification of the detected objects.
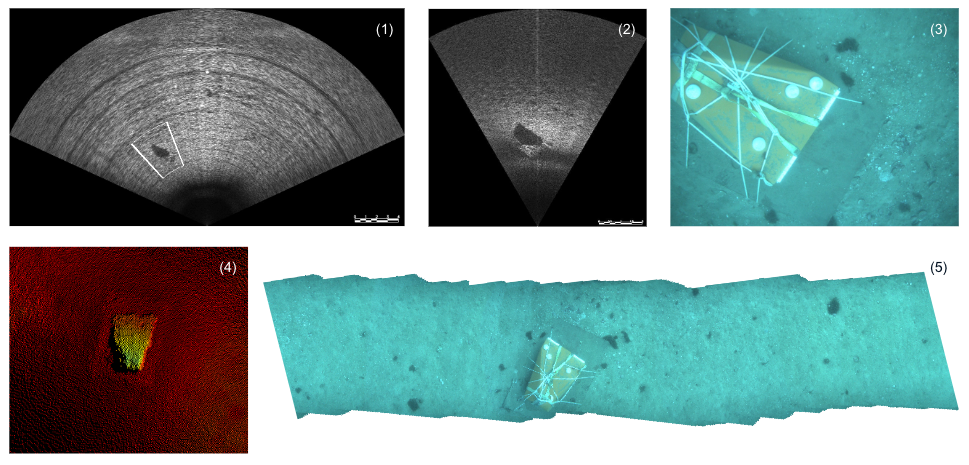
Figure 3: Example of results generated when a contact occurs: (1) Low-frequency forward-looking sonar image where detection occurred. (2) High-frequency forward-looking sonar image. (3) Optical image. (4) Multibeam sonar point cloud. (5) Optical mosaic of reinspection trajectory.
The onboard capability to generate optical maps of the inspections proved to be particularly useful. This allowed the reacquired areas to be quickly reviewed as soon as the vehicle surfaced, enabling the confirmation of potential contacts at a glance without the need to download all the inspection images and identify the ones that passed over the target in question.
CUI: detecting, tracking and mapping

Figure 4. IQUA team operating the SPARUS II UUV from the operations RHIB.
Motivation
Monitoring underwater critical infrastructure is essential for national security and economic stability. Subsea cables, pipelines, and energy systems form the backbone of global communications, finance, and energy supply, making them prime targets for sabotage or disruption. Their remote and often complicated locations, combined with the technical complexity and high costs of reaching underwater areas, make them difficult to protect and, as a consequence, highly vulnerable.
Advanced technical monitoring—using sensors, autonomous underwater vehicles, sonar, and real-time data analytics—enables early detection of tampering, natural hazards, or system failures. These capabilities allow for rapid response to minimize damage and maintain operational capacities. As undersea technologies evolve, safeguarding these assets through technical innovation also becomes a critical element of geopolitical competition, ensuring nations can protect vital networks, deter threats, and preserve trust in the systems that underpin modern society.
Approach
IQUA Robotics’ SPARUS II vehicle tested its approach for cable detection and tracking in the designated shallow CUI area during the REPMUS25 exercise.
In this edition, unlike previous years where sonar-based detectors were used, a new optical detector and tracker was evaluated for the localization and mapping of a cable within the designated area using camera images.
An initial low-density “lawn-mower” survey was programmed to cover the area, with the goal of crossing and locating the cable. At a certain point during this mission, the vehicle detected the cable in the incoming images, and tracking was automatically activated without human intervention. The vehicle then followed the cable in one direction until reaching its end, adjusting along slight bendings to maintain it in sight. Subsequently, the mission was repeated with the tracking behavior in the opposite direction, achieving a complete mapping of the cable. After the mission, all collected data was used to generate a map where all the cable can be seen. A total length of 280m was automatically tracked and mapped.
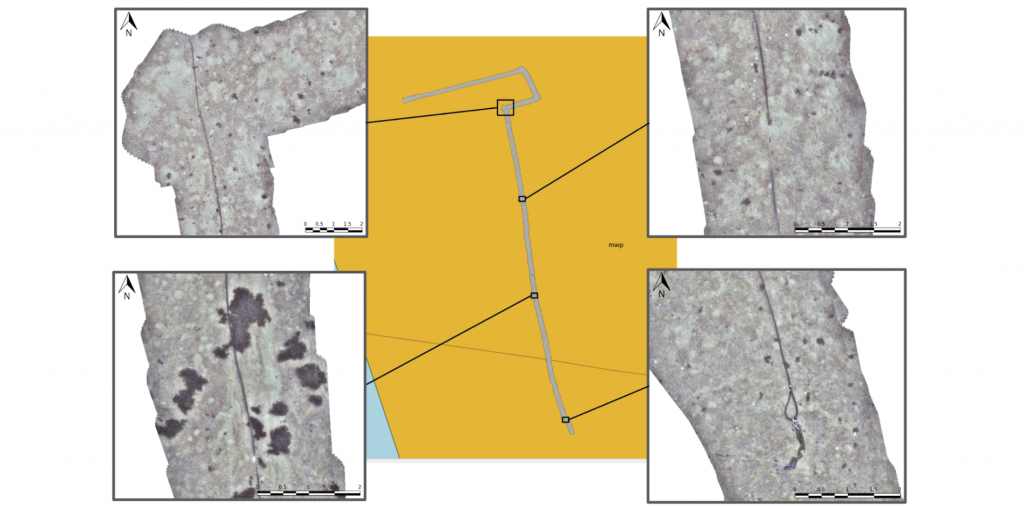
Figure 5. Trajectory mosaic and details of the mapped cable. At the beginning, the vehicle was performing a lawn-mower search pattern. In the middle of the second transect, the cable was detected, and the vehicle initiated automatic following.
STANAG 4817 interoperability

Figure 6. Collaboration between the teams of the US Navy and IQUA Robotics, with their corresponding assets REMUS and SPARUS UUVs.
Motivation
The primary motivation for STANAG 4817 is to enable multi-domain control of unmanned systems across NATO by establishing a common, interoperable framework for command and control (C2) of unmanned aerial, surface, and underwater vehicles (UxV). This standard facilitates the coordinated operation of diverse unmanned platforms by a single operator or a distributed network of operators, which is crucial for complex, multinational operations in compromised environments and for improving mission effectiveness, data sharing, and overall interoperability within the alliance.
In this year’s REPMUS, the SPARUS II UUV was upgraded to use the latest available STANAG 4817 protocol specification, enabling not only status reporting but also allowing it to be tasked by third-party assets. STANAG 4817 interoperability was successfully validated through two separate tests with the United States Navy and the THALES Group, in which SPARUS II acted as the vehicle for target reacquisition and identification.
Approach
In the first case, the US MK18 REMUS vehicle was used to scan two areas with potential targets. During the operation, a reacquisition task in the first area was issued via the 4817 protocol. Upon reception at IQUA’s control station, a mission was automatically generated for SPARUS II to reacquire the designated contacts. A key aspect of this collaboration was the rapid response time and task parallelization: in less than 20 minutes from task reception, SPARUS II had reacquired the two contacts and captured optical images confirming their nature, while the detection vehicle continued scanning the remaining assigned areas.
Similarly, a collaboration was carried out with THALES. Using their M-Cube Mission Management system, SPARUS II was tasked with reacquiring four contacts in a specific area. The task was received while the vehicle was in transit, and IQUA’s system automatically planned a reacquisition trajectory to cover all contacts.
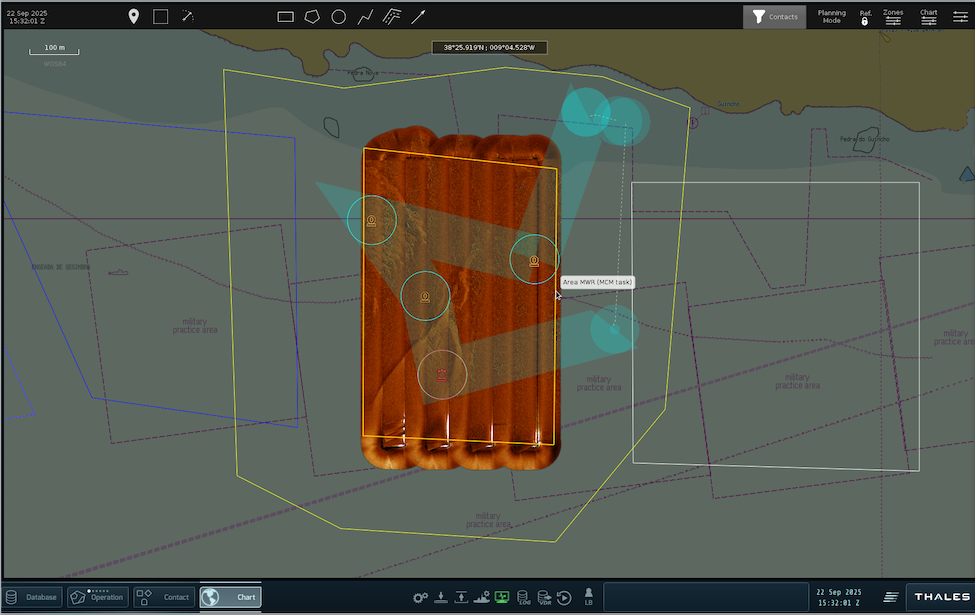
Figure 7. Screenshot of the Thales M-Cube system during the generation of the task for Sparus II to inspect four contacts.
Summary
IQUA Robotics successfully participated in REPMUS 2025, deploying its SPARUS II UUV in mine countermeasures (MCM) and critical underwater infrastructure (CUI) exercises. Once again, collaboration with the Spanish Navy enabled us to participate and achieve successful results. SPARUS II, equipped with advanced sonars and a vision system, demonstrated automatic target detection, real-time reacquisition planning, multimodal contact mapping, and onboard optical map generation in MCM scenarios. For CUI, a new optical detector and tracker enabled autonomous cable localization and mapping, with 280m of cable successfully tracked. Additionally, IQUA Robotics validated STANAG 4817 interoperability by integrating the SPARUS II with US Navy’s MK18 REMUS and THALES Group’s M-Cube system for target reacquisition and identification, showcasing rapid response and task parallelization in a multinational setting.

Figure 8. Collaboration between the Spanish Navy and IQUA Robotics, with all UUVs participating in REPMUS25
#WeAreNATO #REPMUS25 #REPMUS #MaritimeUnmmanedSystems #Innovation #CUI #MCM #Technologies #InnovationNATO #DataExploitation #AUV #UUV #SPARUSII #collaboration