99% of the communications occurring in the world today happen through underwater fiber optic networks. There are more than 420 submarine lines in the world, totalling 1.3 million kilometers which allow us to communicate and operate in the way we do as a society. These infrastructures are equally important today as oil and gas pipelines, since the volume of financial transactions, very relevant to the system, run through these underwater cables.
Underwater environments are hazardous and especially difficult to monitor for two main reasons: firstly, the locations themselves may be areas of difficult access either for their depth, the existing currents, or even the movements of the seafloor and, secondly, the technologies that are commonly available in the surface, like GPS or WiFi will not work. So, there is a clear vulnerability for the security of these infrastructures.
On average, there are over a hundred breaks of submarine cables every year, caused in general by the fishing boats that pull the anchors. But, being identified as critical infrastructure, they are also a target for potential sabotage. The first attacks registered date back in 2017. Although they remain unknown to the general public, they are no less worrying and prove the capacity of external powers to separate Europe from the rest of the world.
Keeping this context in mind and in the framework of “Robotic Experimentation and Prototyping using Maritime Uncrewed Systems” (REPMUS) exercise, multiple technologies for automatic underwater cable detection and inspection were tested in a simulated complex scenario. Led by NATO, the event takes place annually in the Lisbon coastal area hosted by the Portuguese Navy.

Figure 1. SPARUS II AUV deployed in the area of interest. ©IQUA robotics
IQUA robotics participated in REPMUS 2023 exercise, invited by the Spanish Navy to prove the capabilities of its vehicle SPARUS II AUV for the described mission. The goal of the mission was to, in a completely autonomous way, locate the cable and inspect it from nearby to be able to identify potential threats to it.
One of the characteristics of the SPARUS II AUV is its possibilities to be configured according to the mission needs, in this case, the vehicle was equipped with an optic camera system developed by IQUA and a commercial forward looking sonar.

Figure 2. SPARUS II AUV configuration for CUI inspection. ©IQUA robotics
The IQUA Robotics strategy for addressing the assigned task consisted of the following steps:
- Deploying the AUV in proximity to the supposed cable location.
- Executing a predefined autonomous mission within the area, while employing an automated algorithm to continuously analyze incoming forward-looking sonar data to detect the cable presence.
- Without human intervention and without requiring resurfacing, the AUV automatically plans a trajectory connecting all potential cable locations observed in the sonar images.
- The AUV then follows the planned trajectory close to the seafloor, enabling the camera system to capture images of the cable along its route.
- Returning to the surface with the collected data.

Figure 3. Schematic of the approach taken for capturing the cable data for inspection. ©IQUA robotics
Throughout the mission, real-time monitoring was conducted from the surface through the IQUAview user interface, which visualized data transmitted by the AUV via an acoustic modem. The collected data allowed the creation of acoustic maps and visual reconstructions along the cable.
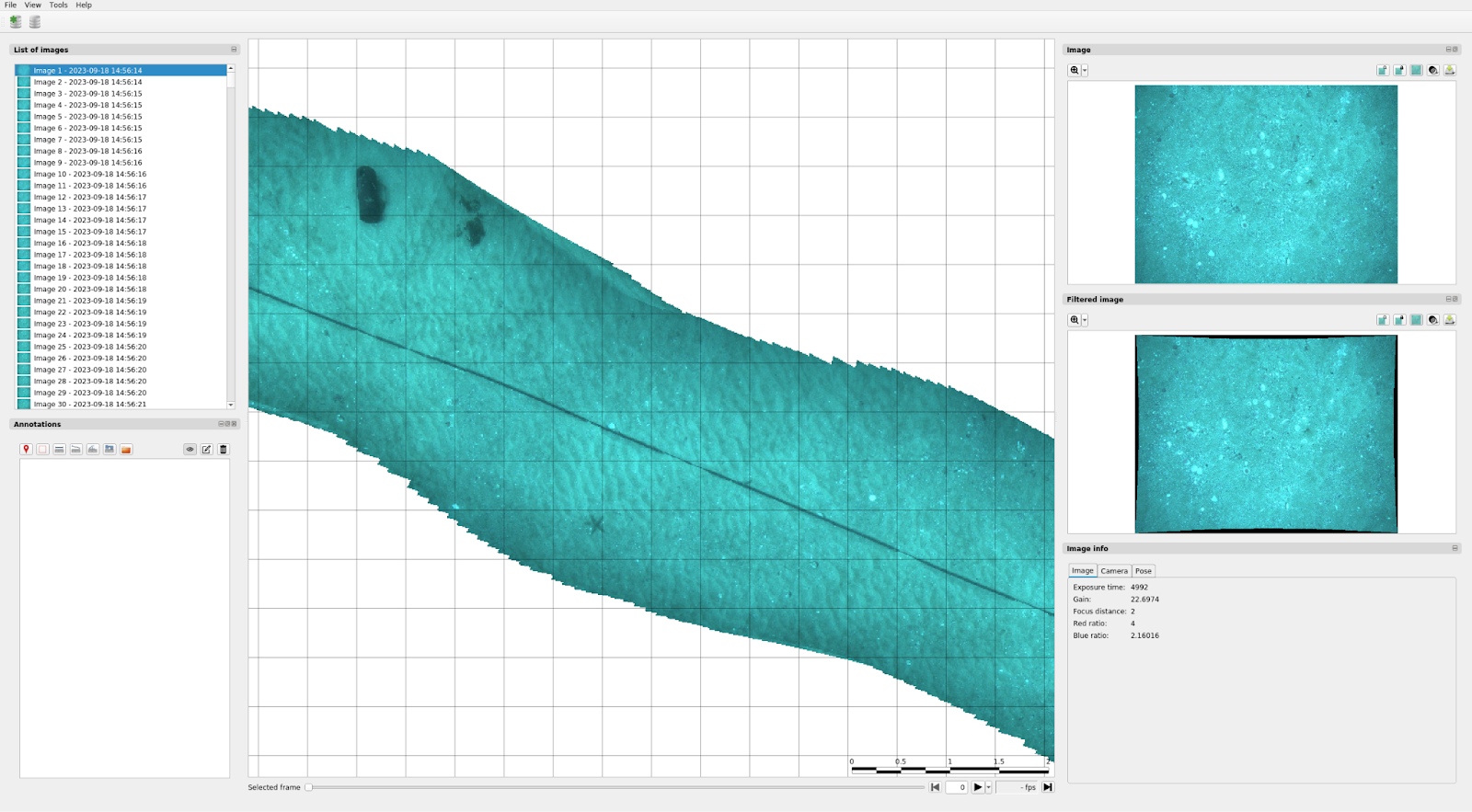
Figure 4. Visualization from the control station of the obtained optic data off-line. ©IQUA robotics
The image below shows a mosaic of approximately 150m long x 2.5m wide where one suspicious element is clearly identified (60x20cm) and can be seen with high resolution for its interpretation. The capability of finding such objects closeby the cables without human intervention can be key to the future of the security of critical underwater infrastructures.

Figure 5. Mosaic created of the inspected area available in high resolution for its interpretation. ©IQUA robotics
Sources: