“The way we inspect (video mapping and imaging sonar) is quite unique in the Netherlands. The use of imaging sonar is a basic necessity for our company. Without it, we have no right to exist. In addition, we can translate the data into information that the owner can use. The combination of high quality data and thorough advice distinguishes us.” says Peter Nieuwenhuizen, CEO at oQuay

oQuay was founded in 2009 in the Netherlands. They work in environments where the water is often turbid and there is little or nothing to see in the video images. The company looked for an alternative technology to help their clients in these difficult conditions and finally ended up choosing imaging sonar technologies, specifically, the ARIS Sound Metrics sonar, which they operate from an ROV.
“We mainly inspect quay walls and bank constructions. This year we have seen an increase in the number of inspections between shore and ship. Often, this is not inspected because temporarily moving a boat is a lot of hassle or the inspection is too dangerous for divers. With our ROV we can easily maneuver in between and still perform the inspection.”
Their team is composed of four people, including: a ROV pilot, a team member specialized in processing the data and two more employees devoted to understanding the quay constructions, assess the content of the data and give advice on repairs to be carried out to the end customer.
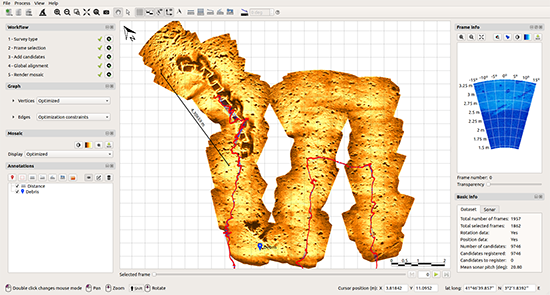
The company recently acquired SoundTiles, an IQUA robotics stand-alone software solution for automatic generation of underwater acoustic mosaics from forward-looking sonar images. The software allows to process a set of sonar images in one single informative mosaic, easing the interpretation of the imaged scene, allowing the identification of spatial relationships and offering a map of increased resolution and signal-to-noise ratio with respect to the individual sonar images.
“SoundTiles helps us now to get panoramic pictures that help us to better interpret the situation below the waterline. You have more overview. We manage quite well to make the mosaics ourselves, making about 1 mosaic per week; the mosaics definitely have an added value to be able to see underwater.”