From the 5th to the 16 of May 2025 the Spanish Navy hosted the multinational exercise SPANISH MINEX-25 that took place in the Balearic Islands waters.
SPANISH MINEX is an annual exercise that takes place in Palma (Spain) with the aim of testing systems in a collaborative environment for Mine Countermeasures (MCM). Organized by the Armada, the exercise included this year the participation of Belgium, USA, France and Italy, amongst others. This year we had the chance to actively participate in SPANISH MINEX alongside our clients, the Spanish Navy (Armada) and the University of the Balearic Islands (UIB).
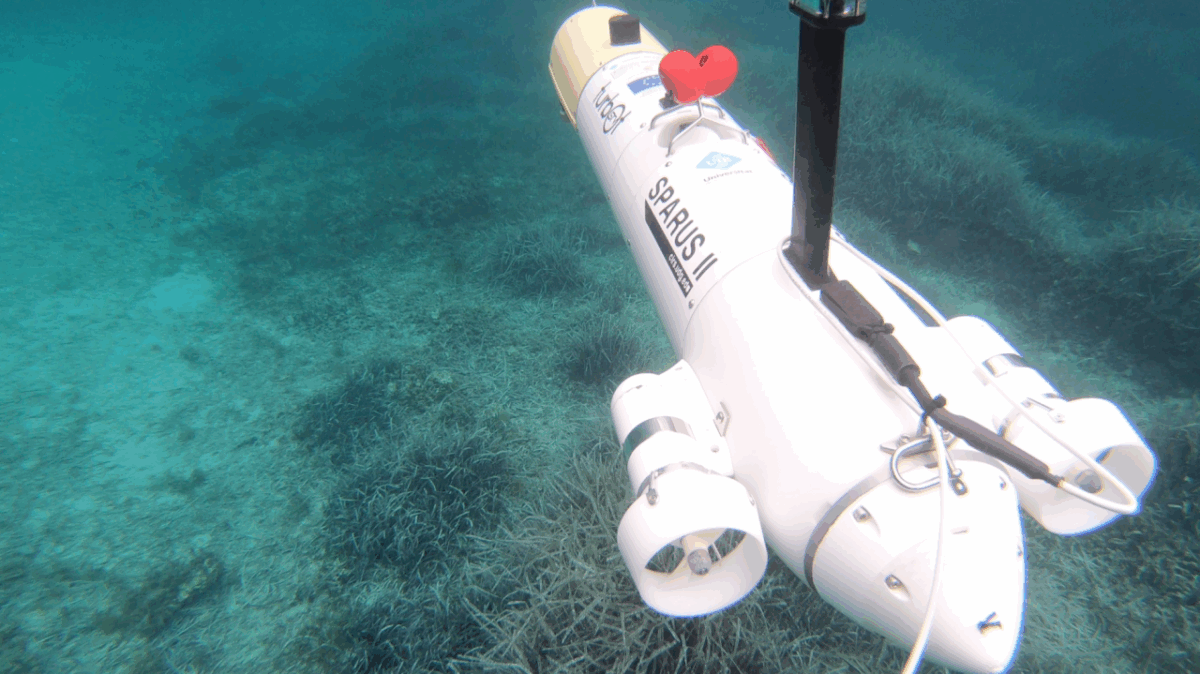
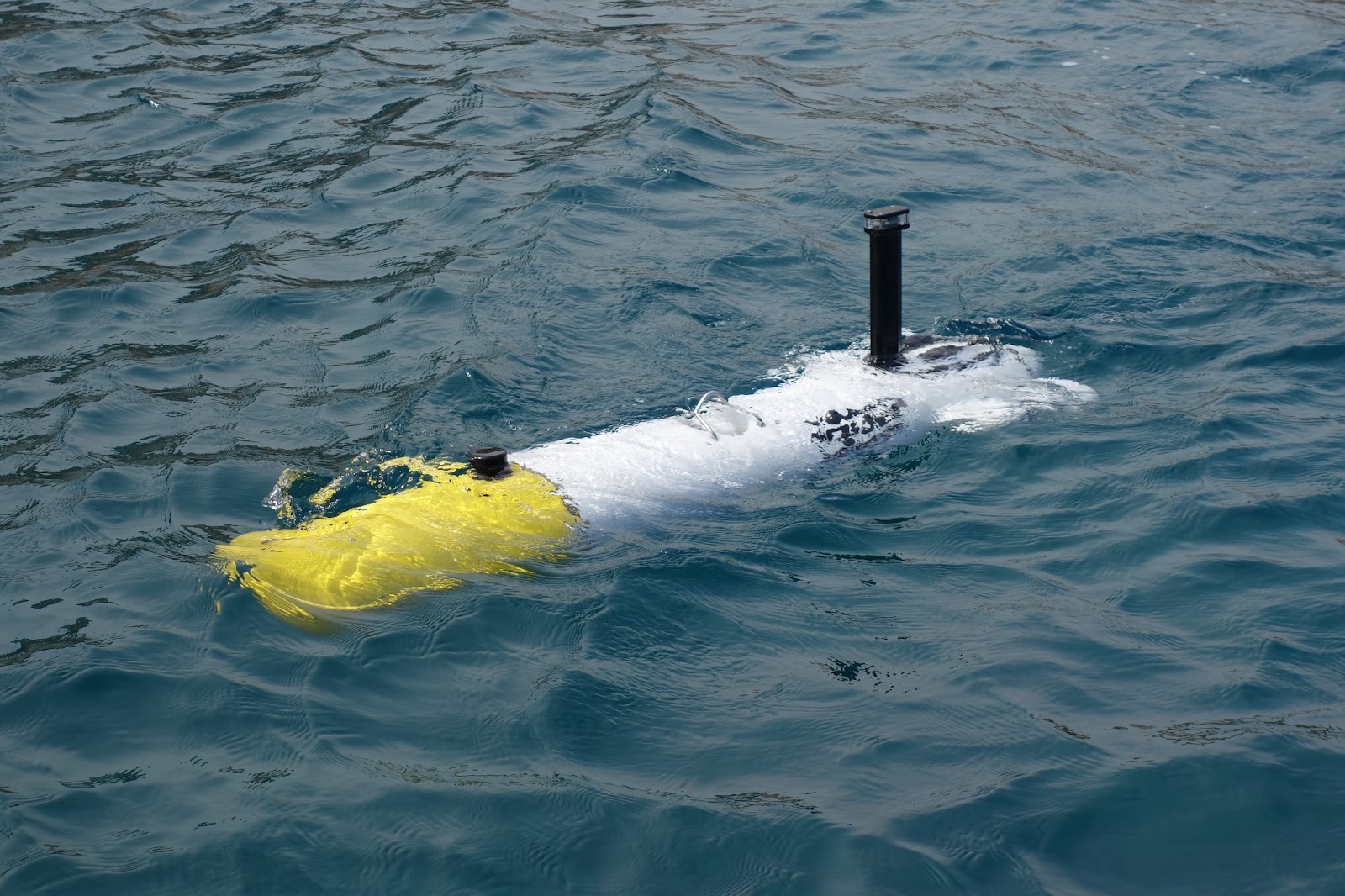
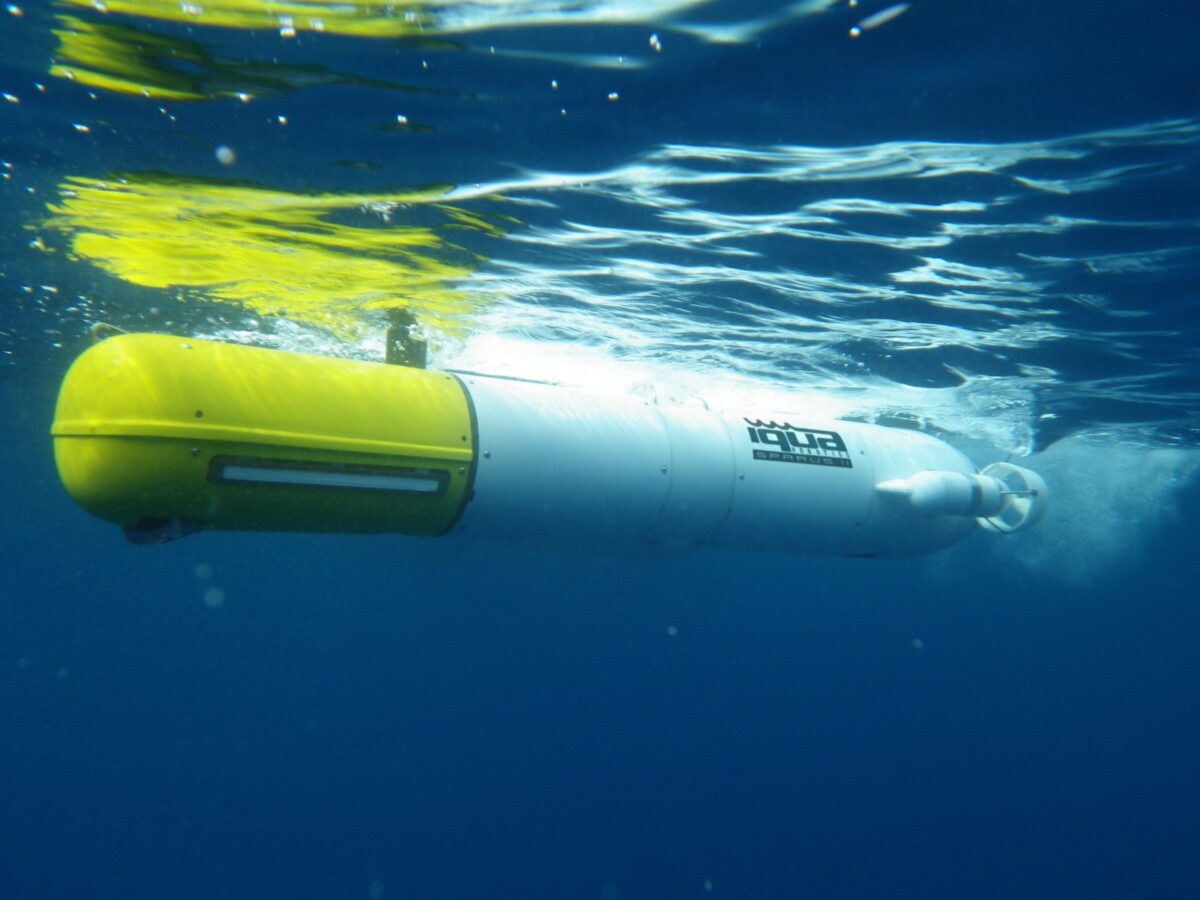
Figure 1. SPARUS II AUV ORAT surfacing after its mission in front of Porto Pi area (Mallorca).
The Armada was operating the two SPARUS II AUV units that they acquired back in 2023 for MCM applications. Besides autonomous underwater vehicles, the Spanish Navy tested underwater detection systems on board of its vessels together with divers specialized in mine neutralization.
Figure 2. Part of the AUVs that participated in SPANISH MINEX-25.
SPARUS II AUV ORAT is one of the most recent units that we have manufactured, it is the second unit of UIB fleet and it was conceived to be a multimodal mapping platform. With an improved navigation system incorporating an Exail INS, ORAT’s payload is composed by a multibeam echosounder from Norbit, a side scan sonar from Atlas Marine Sonic and a stereo camera system with lights developed by the IQUA team and especially designed for this particular payload configuration. Our team operated the vehicle together with the team of engineers at the UIB with the aim of testing the unit in a realistic scenario for MCM.
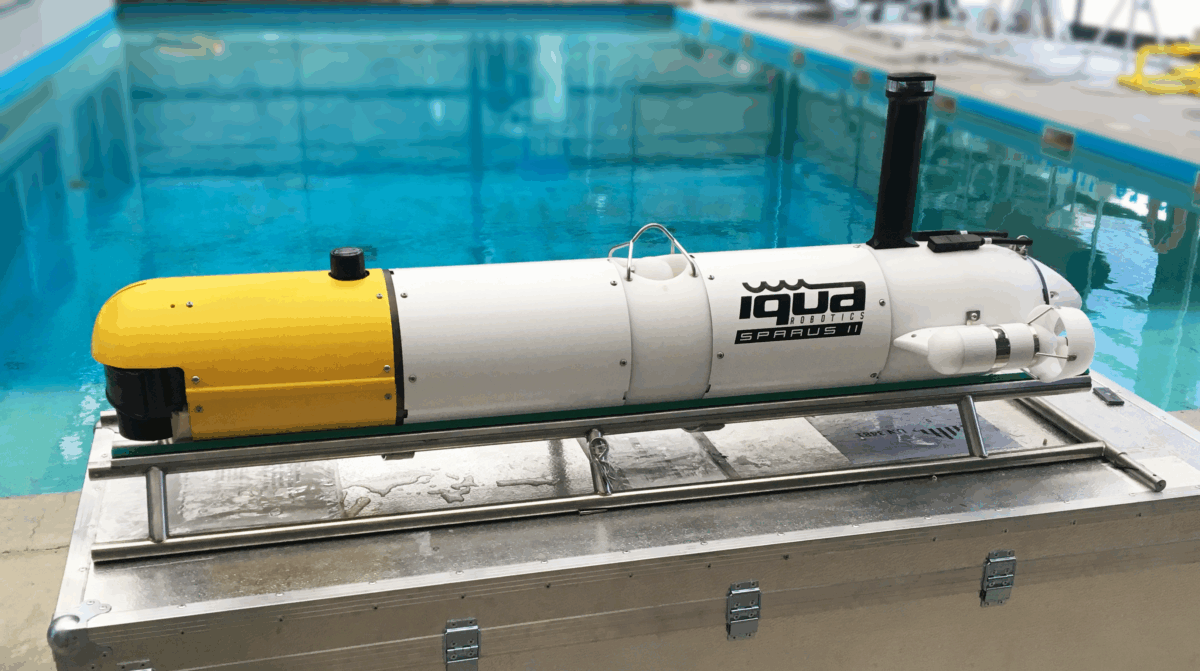
Figure 3. SPARUS II AUV ORAT configuration.
The results obtained prove the capability of the vehicles for gathering accurate data in an efficient manner, allowing the team to produce multiple complementary maps of the seafloor, automatising part of the mine detection process.
Figure 4. Shipwreck area mapped using multi beam and side scan sonar.
Figure 5. Sewage pipe area mapped using side scan sonar, multi beam and stereo camera system.
Micro and small-sized AUVs can integrate a wide range of sensors and navigation systems, making them ideal for applications in littoral waters due to their ease of deployment and operation. However, effectively exploring, locating, and mapping survey targets often requires combining multiple sensing techniques. Additionally, close-range, high-resolution inspection—traditionally performed by a secondary vehicle like an ROV—is highly desirable.
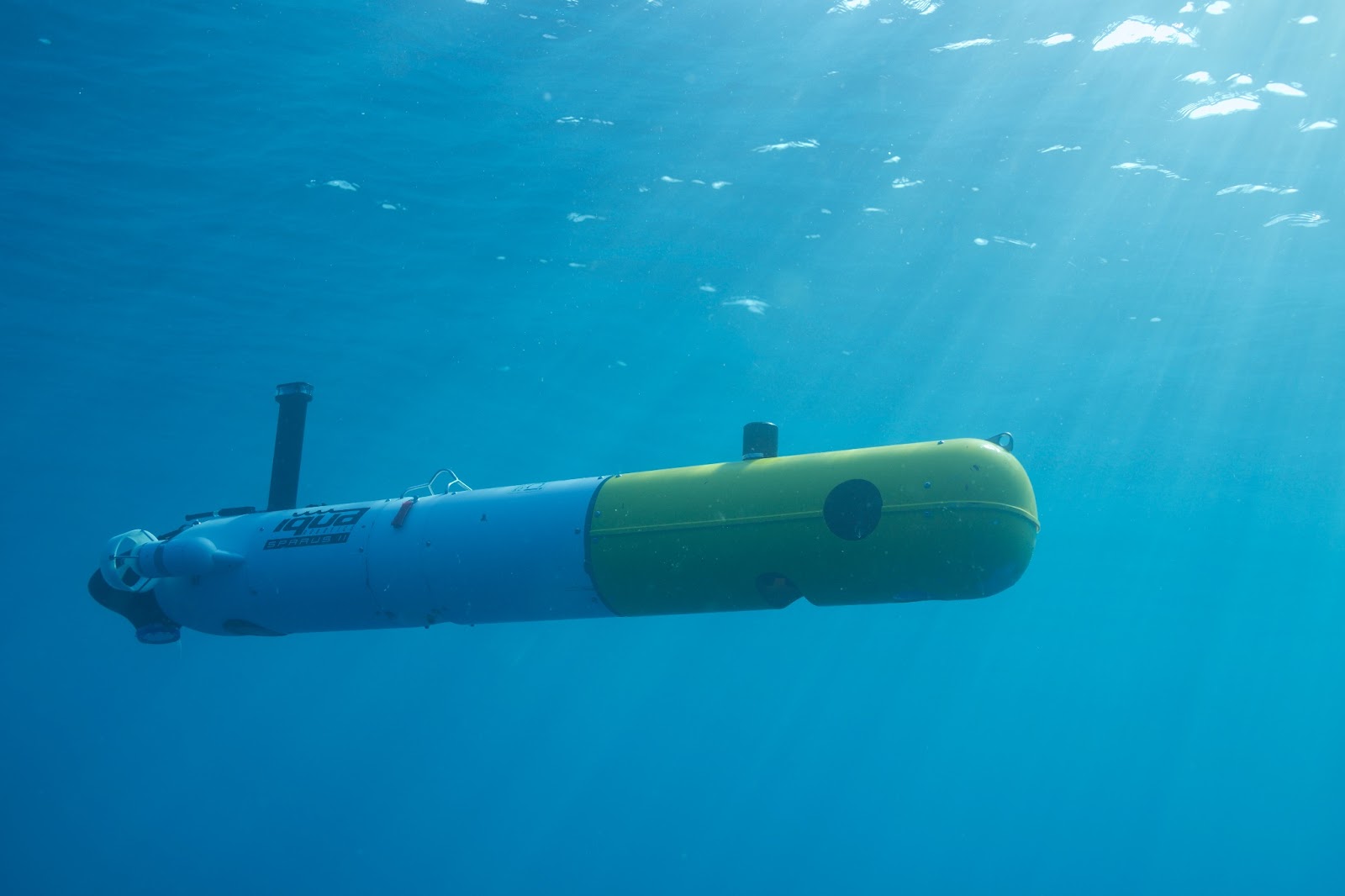
Figure 1: SPARUS II hovering AUV mapping a rocky area during a survey mission.
The difficulties of conducting and repeating sea campaigns, coupled with technological advancements, have driven the development of AUVs with multimodal perception payloads and hovering capabilities, enabling simultaneous exploration, surveying, and inspection. The SPARUS II AUV from IQUA Robotics embodies these characteristics and can be equipped with a comprehensive and complementary suite of sensors, including acoustic (sidescan sonar, multibeam echosounder, or forward-looking sonar), optical, and magnetic sensors, as well as precise navigation systems and sensors for measuring water parameters.
Figure 2: Payload for multimodal mapping: Teledyne RDI Pathfinder 600 DVL, Exail Phins C3 INS, Norbit WBMS MBES, Atlas Marine Sonic MKII 900 kHz sidescan sonar, and IQUA Robotics stereo camera system.
Thanks to its ease of deployment and recovery, simple operation, and streamlined processing pipelines, SPARUS II can perform consecutive missions from a support vessel, enabling a rapid cycle of data collection, analysis, and planning for successive missions based on previous findings. Sensors with broader coverage, such as sidescan sonar (SSS) or multibeam echosounder (MBES), are used to explore and locate areas of interest. The ability to acquire data from complementary sensors during the same mission —such as comparing the sonar intensity map from the sidescan sonar with the point cloud generated by the MBES— enables a more accurate interpretation of the scene. Higher-resolution sensors, such as forward-looking sonar (FLS) or optical cameras, provide detailed mapping of the scene. Additionally, the possibility to set-up a scanning trajectory that acquires data in all directions with precise control, allows to capture the necessary information for a later reconstruction of the inspected area.
Figure 3: Sewage pipe located with sidescan sonar (left), mapped at low altitude with MBES (middle), and stereo camera (right) during the same experimental deployment.
The SPARUS II AUV is designed to accommodate the latest sensor and navigation technologies. Its robust structure and sufficient power/autonomy enable it to operate in challenging maritime conditions for a full workday. This small-class AUV can reach a maximum depth of 200 meters and can be easily operated from a variety of vessels by a team of two people.
Figure 4: Top: Mapping of the same Posidonia meadow with sidescan sonar (left) and MBES (right), where the complementary acoustic image and bathymetry provide a better understanding of the area. Bottom: Rocky area mapped with SoundTiles FLS post-processing software (left) and optical camera (right).
Available software tools simplify mission planning, monitoring, and rapid data processing, allowing users to quickly analyze the AUV’s findings while it remains on the surface, ready for the next mission. Alternatively, real-time data processing can be performed onboard, directly linking environment exploration with inspection tasks when a target is automatically detected. Artificial intelligence plays a vital role here in scene recognition and decision-making.
Figure 5: Autonomous and real-time target detection and reacquisition with SPARUS II. Forward-looking sonar images (from Blueprint Subsea Oculus M1200) are processed at low frequency to detect the target, in this case, a fishing cage (top-left). After positive detection, the AUV adjusts its predefined trajectory to approach the target, reacquiring it acoustically at high frequency (top-right) and optically (bottom-left) in a multiple crossing trajectory. This enables full coverage and a 3D reconstruction in post-processing (bottom-right). Once the target has been inspected, SPARUS II resumes its trajectory to continue the survey, discovering and inspecting new targets.
In this article we want to summarize the last 10 years of history at the Systems, Robotics and Vision research lab (SRV) at the University of the Balearic Islands (UIB), always linked to their SPARUS II AUV platform named Turbot. We’ve interviewed former members of the team as well as the current generation of researchers at SRV to understand what was the impact of acquiring an AUV platform for testing technologies in their everyday research and to understand their future goals.
Back in 2014, the team at the SRV was working on its research projects on underwater vision and robotics using a tailor made remotely operated vehicle, the Fugu ROV. It was a small ROV with a small lithium battery, a pressure sensor and a couple of stereo cams pointing to the front and below, in the times when small ROV affordable platforms were not a reality yet. With four small thrusters, they were able to move the vehicle up and down and gather datasets that, unfortunately, were not always ideal to work with.
The Fugu ROV helped the team to develop new technologies, starting with a ROS based architecture and visual odometry algorithms. In parallel, a vision payload was developed for the Fugu, the Fugu-flex, that was then integrated into Nessie AUV (from Heriot Watt University) and Girona 500 AUV (from University of Girona) in the framework of the EU funded project TRIDENT.
Fugu ROV was soon too limited for a growing team of researchers that was eager to evolve in its work. M. Massot, former researcher of the SRV, remembers that times “we needed to look for a bigger autonomous vehicle, with DVL, that could handle our camera systems and with a ROS based architecture; the idea was to be able to keep the same research lines that we were working in and not having to reinvent the developed technology so far. Gabriel Oliver (the head of the research lab) introduced the idea of the SPARUS II AUV platform and, fortunately, he managed to find the funding to acquire it!”.
The arrival of the SPARUS II AUV Turbot (named after the flatfish in Catalan language) changed the lab’s everyday dynamics; having a testing AUV that allowed gathering longer datasets and the technical support of the manufacturing team, helped the SRV to focus on their research. “Buying an operative platform and not having to be worried about waypoint following, navigation, reliable control, having USBL communication solved,… helped us to focus and advance faster in the technologies we were working on”, Massot remembers.
The first vehicle that the UIB acquired was a platform equipped with a DVL from Teledyne Marine and an acoustic modem with USBL from Evologics. On top of that, it was the SRV team who built up multiple payloads using different camera systems and also used the platform as a basis to evolve in their vehicle’s ROS based achitecture. In the years of Turbot at the lab, 4 PhD theses have been defended and more than 70 articles have been published in relation to the technologies that have been tested in the SPARUS II AUV.
“I started working at SRV when they had recently purchased the Turbot. I actually joined the lab because they had an AUV where I could work hands-on and I felt that being part of that team would help me to grow professionally. Research work made us do it all together as a complementary team, the flexibility of the platform and the possibility to further build up on the work carried out, was a continuous stimulation towards testing new things. The AUV made sense and, for the first time, we could generate useful data for third parties” points out E. Guerrero, former SRV member.
F. Bonin, associate professor at the UIB, explains: “Currently, in the framework of collaborative research projects, the team is working in two main research lines: industrial applications and biological applications. In the first one, we are using the AUV for intervention in underwater infrastructure whereas in the second one we are using the AUV to gather data from the seafloor with the aim of post-processing it online and offline to extract information of the interest for the biologists. We aim to follow these research lines and keep collaborating with multiple institutions, since we see that this is the best way to grow in areas that we can contribute widely.” To that end, the SRV team has decided to purchase a new SPARUS II AUV unit, equipped with multiple sensors, in order to amplify the kind of work carried out with different kinds of data.
Recently, the UIB team decided to buy a new SPARUS II AUV unit for various reasons, she will be called ORAT (sea bream in Mallorca Catalan dialect). “We’ve been working with the SPARUS II Turbot and the experience has been very satisfying; it’s a vehicle that covers our needs both in research and in some applications for data gathering for the scientific community. The model covered our technical needs and IQUA robotics was the best candidate we had. ORAT will complement TURBOT. The first one will be devoted exclusively to data gathering to work on our post processing capabilities and also for working in cooperation with other vehicles. The latter one will be used for research that imply physical modifications of the AUV ” says Gabriel Oliver, Professor at the UIB and research lead at the SRV lab.
The new SPARUS II AUV ORAT, the first unit of a new upgraded generation of SPARUS, will have an enhanced navigation system integrating the Phins C3 Exail INS and a fully capable all-in-one payload that will contain a Norbit multibeam echosounder, a Marine Sonic side scan sonar and an IQUA Robotics developed camera system. “The incorporation of such technologies shall significantly increase the capabilities of the lab for participating in new projects. We will have more robust navigation and more precise sensors, giving to the vehicle more versatility and feasibility when gathering seafloor data” confirms G. Oliver.
Alongside with the new AUV, the UIB has acquired an autonomous surface vehicle of the brand Maritime Robotics that will provide further capabilities to the facilities at the UIB.
A few months ago, the current SRV team gathered in Palma de Mallorca (Spain) at the Martech workshop where they symbolically celebrated the 10 years of their youngest lab member who brought them a change of paradigm when most needed back in 2014 and who has opened doors that they would not had imagined when they started their research activity. Happy birthday Turbot!
The PLOME project has tested new technologies that will allow the deployment of stations and vehicles to monitor the marine environment and provide real-time data. The experiments have been conducted along the Catalan coast at depths of up to 350 meters.The project is led by the University of Girona, with participation from the UPC, the UIB, the UPM, the ICM-CSIC, and the company Iqua Robotics.
An oceanographic campaign has validated this past December a set of innovative technologies developed within the framework of a research project coordinated by the University of Girona (UdG) with the aim of improving the supervision, monitoring, and management of marine ecosystems. The campaign took place aboard the oceanographic vessel Sarmiento de Gamboa, of the CSIC, off the Catalan coast, at depths ranging from 70 to 350 meters.
The research project is called “Long-Term Platform for the Observation of Marine Ecosystems (PLOME)” and is comprised of six partners: the University of Girona (UdG), the Universitat Politècnica de Catalunya – BarcelonaTech (UPC), the University of Balearic Islands (UIB), the Polytechnic University of Madrid (UPM), the Institute of Marine Sciences (ICM-CSIC) and the company Iqua Robotics.
The PLOME project, funded by the Spanish Research Agency and Next Generation European funds, is working to develop a non-invasive and modular platform to gather essential data for the scientific community to supervise, monitor, and manage marine ecosystems more efficiently. So far, a set of independent systems has been developed, consisting of fixed stations that remain on the seafloor, underwater vehicles, and surface vehicles. These systems are equipped with batteries and wireless communication systems, and they work together autonomously to collect data.
Currently, data extraction can only be predominantly carried out when a human team conducts an oceanographic campaign. The project aims to advance this information gathering system. Thus, the PLOME platform allows remote monitoring without the need for human intervention once the systems have been deployed on the seafloor, over a period of several weeks, with real-time communications facilitating ecosystem tracking.
During the December campaign, two fixed stations, two underwater vehicles, and a surface buoy were deployed to transmit information, which served to validate the operation of the various technologies developed since the beginning of the project. The systems communicated correctly using acoustic modems to share data and optical communication to share images. The cameras, installed on each system, recorded data from the seafloor and simultaneously processed it using artificial intelligence techniques to detect the presence of individuals such as fish or crustaceans. New technologies for optical and acoustic mapping of the seafloor were also validated, allowing for the reconstruction of terrain or acoustic visualization to reduce the impact of artificial light in habitats where sunlight does not reach.
The test results were successful, and work is already underway on the next validation campaigns of the project. The next one will take place at OBSEA, the UPC’s cabled marine observatory located in Vilanova i la Geltrú. In this case, a fixed station will be installed with the capacity to contain an underwater vehicle that will daily carry out monitoring tasks and return to the station to recharge batteries and transmit information. The final campaign of the project will be carried out in 2025, once again aboard an oceanographic vessel, to validate the final development of the deep-sea monitoring platform.
Figure 1. Members of the oceanographic campaign in front of the Sarmiento de Gamboa ship in the port of Palamós.
Figure 2. UPC fixed stations prepared to be placed on the seabed.
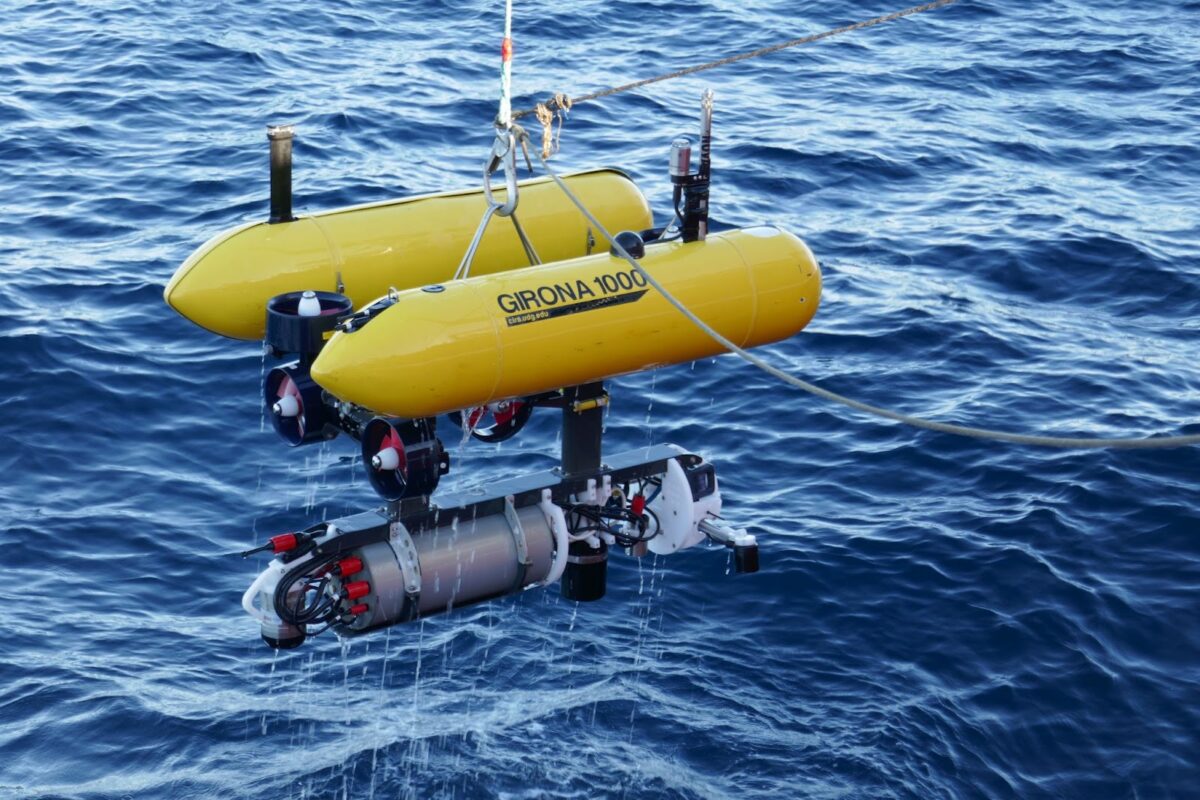
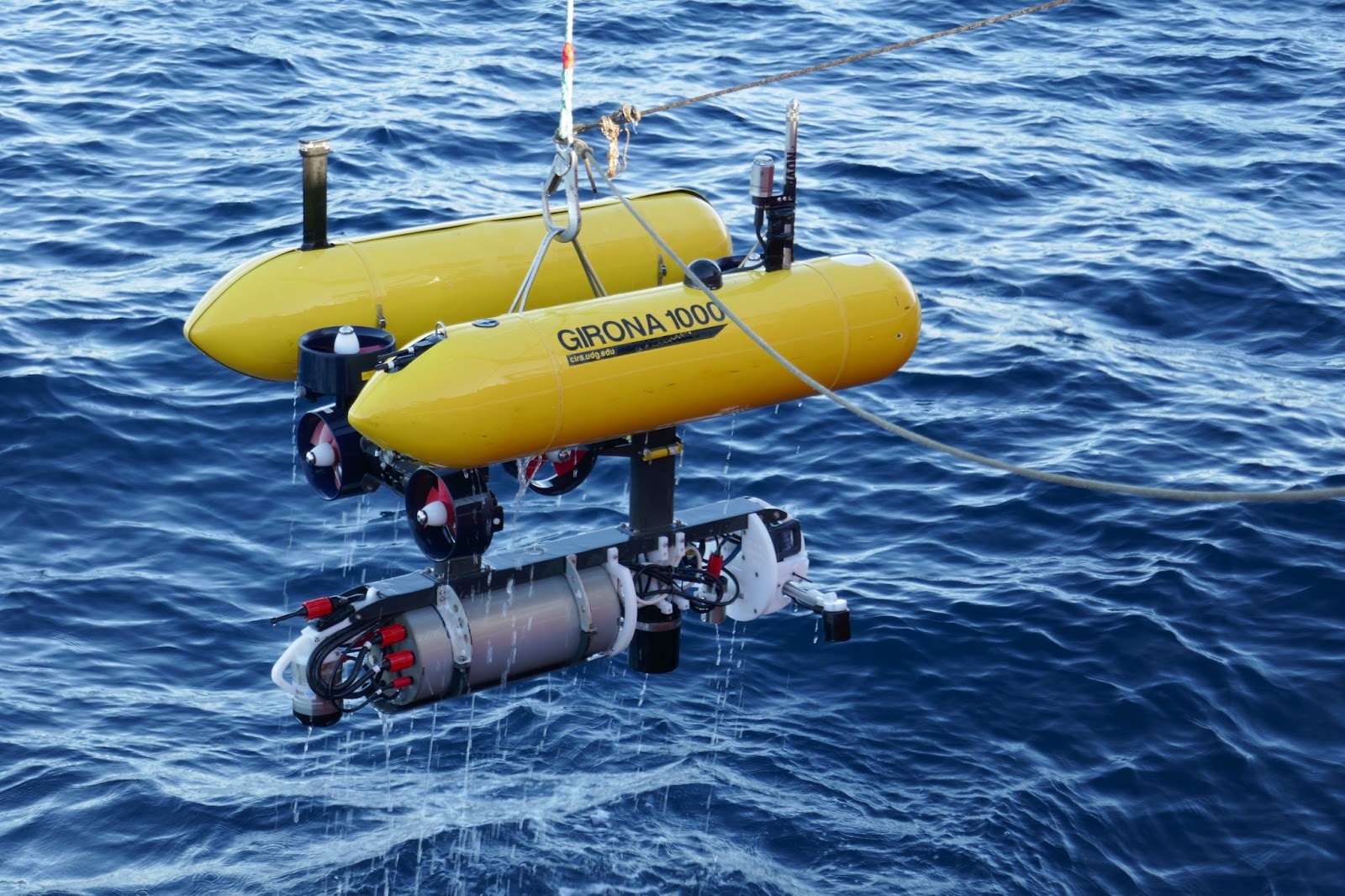
Figure 3. Recovery of the Girona 1000 autonomous underwater vehicle of the UdG.
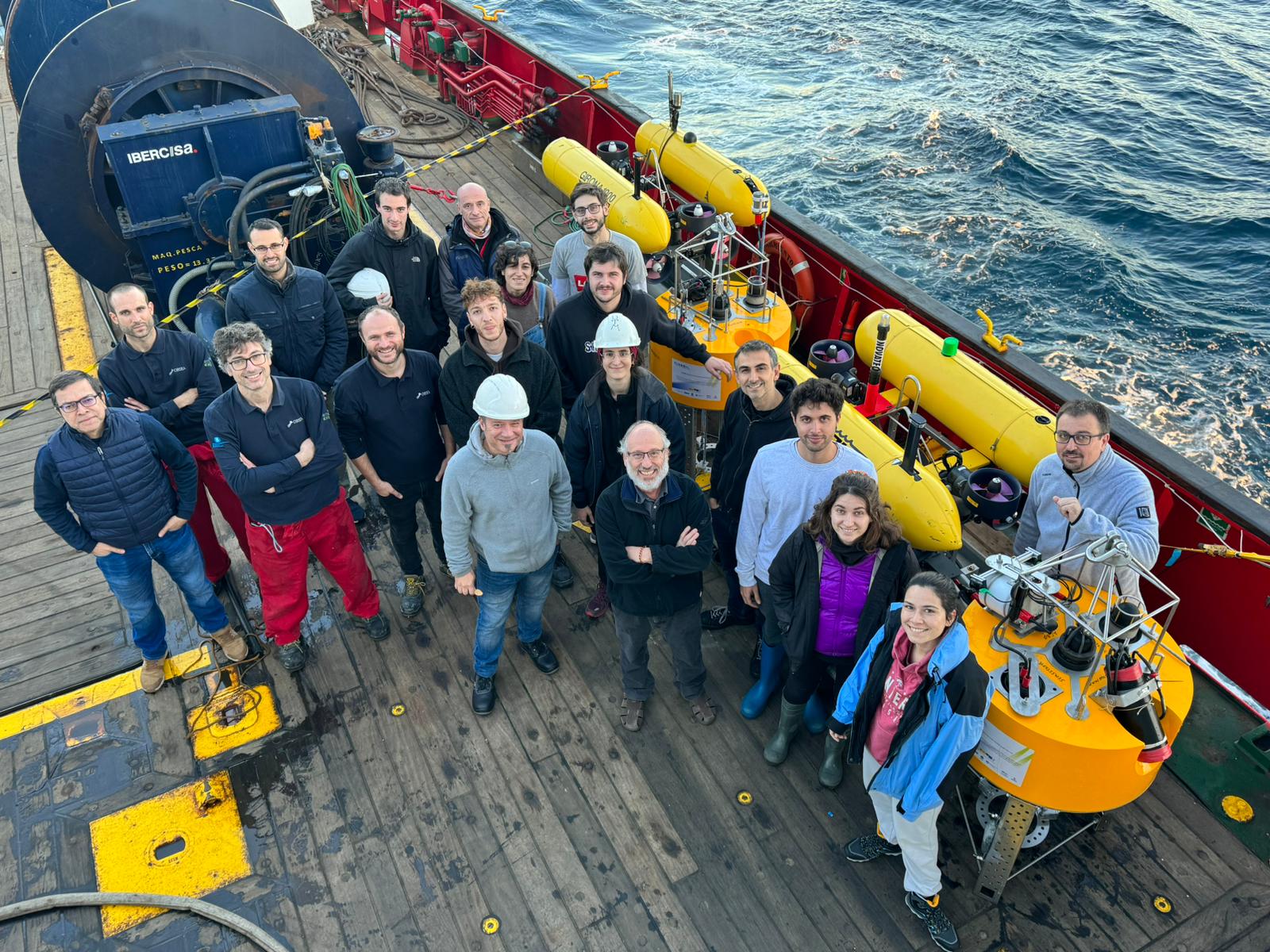
Figure 4. PLOME project work team at the end of the campaign.
99% of the communications occurring in the world today happen through underwater fiber optic networks. There are more than 420 submarine lines in the world, totalling 1.3 million kilometers which allow us to communicate and operate in the way we do as a society. These infrastructures are equally important today as oil and gas pipelines, since the volume of financial transactions, very relevant to the system, run through these underwater cables.
Underwater environments are hazardous and especially difficult to monitor for two main reasons: firstly, the locations themselves may be areas of difficult access either for their depth, the existing currents, or even the movements of the seafloor and, secondly, the technologies that are commonly available in the surface, like GPS or WiFi will not work. So, there is a clear vulnerability for the security of these infrastructures.
On average, there are over a hundred breaks of submarine cables every year, caused in general by the fishing boats that pull the anchors. But, being identified as critical infrastructure, they are also a target for potential sabotage. The first attacks registered date back in 2017. Although they remain unknown to the general public, they are no less worrying and prove the capacity of external powers to separate Europe from the rest of the world.
Keeping this context in mind and in the framework of “Robotic Experimentation and Prototyping using Maritime Uncrewed Systems” (REPMUS) exercise, multiple technologies for automatic underwater cable detection and inspection were tested in a simulated complex scenario. Led by NATO, the event takes place annually in the Lisbon coastal area hosted by the Portuguese Navy.
IQUA robotics participated in REPMUS 2023 exercise, invited by the Spanish Navy to prove the capabilities of its vehicle SPARUS II AUV for the described mission. The goal of the mission was to, in a completely autonomous way, locate the cable and inspect it from nearby to be able to identify potential threats to it.
One of the characteristics of the SPARUS II AUV is its possibilities to be configured according to the mission needs, in this case, the vehicle was equipped with an optic camera system developed by IQUA and a commercial forward looking sonar.
The IQUA Robotics strategy for addressing the assigned task consisted of the following steps:
Deploying the AUV in proximity to the supposed cable location.
Executing a predefined autonomous mission within the area, while employing an automated algorithm to continuously analyze incoming forward-looking sonar data to detect the cable presence.
Without human intervention and without requiring resurfacing, the AUV automatically plans a trajectory connecting all potential cable locations observed in the sonar images.
The AUV then follows the planned trajectory close to the seafloor, enabling the camera system to capture images of the cable along its route.
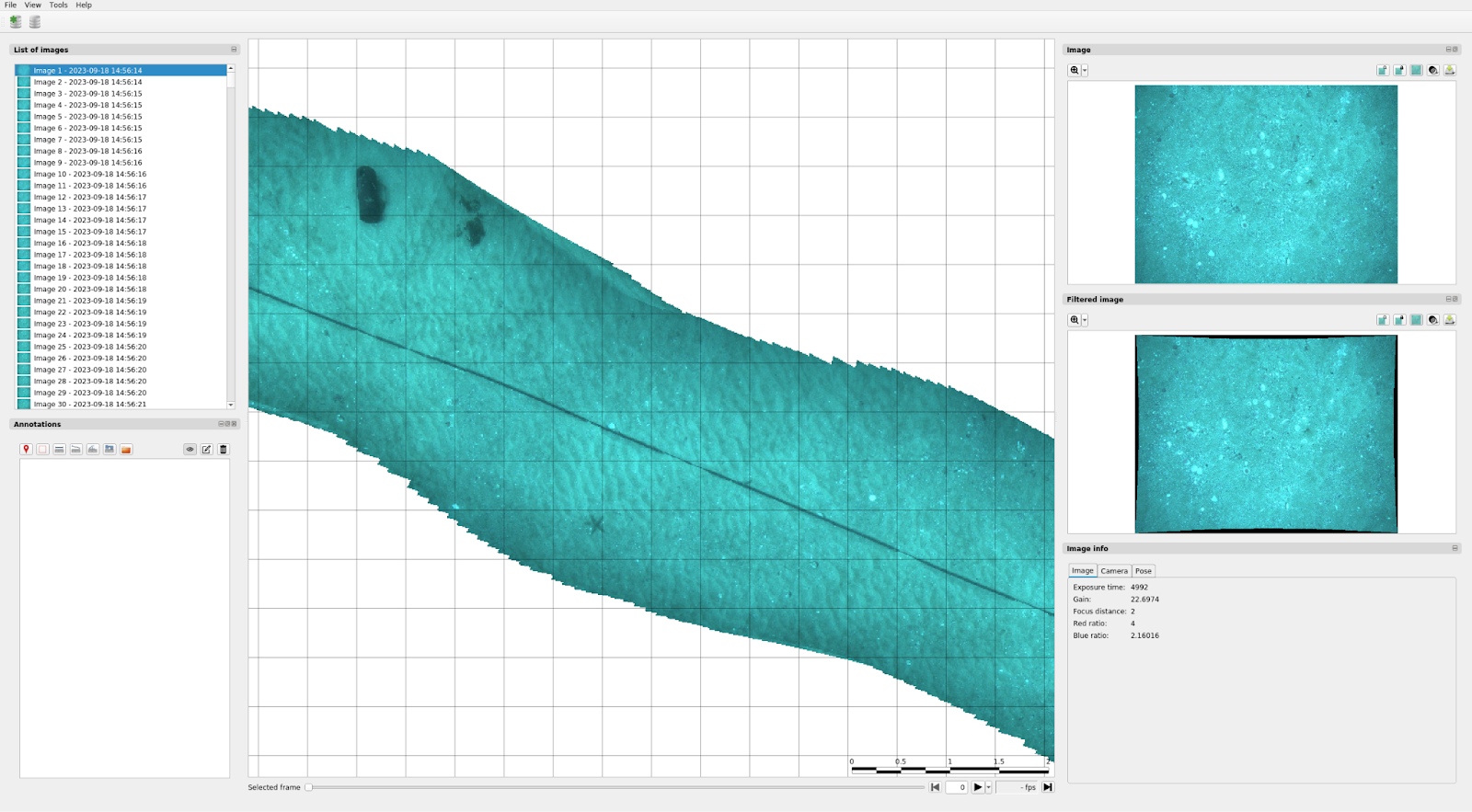
Throughout the mission, real-time monitoring was conducted from the surface through the IQUAview user interface, which visualized data transmitted by the AUV via an acoustic modem. The collected data allowed the creation of acoustic maps and visual reconstructions along the cable.
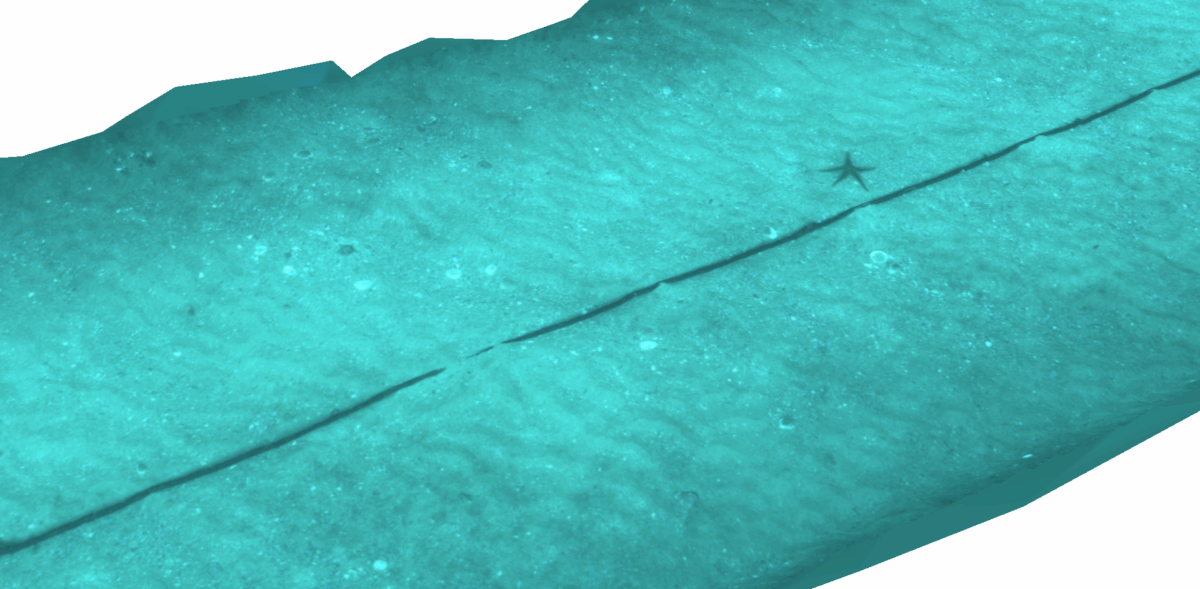
The image below shows a mosaic of approximately 150m long x 2.5m wide where one suspicious element is clearly identified (60x20cm) and can be seen with high resolution for its interpretation. The capability of finding such objects closeby the cables without human intervention can be key to the future of the security of critical underwater infrastructures.
Back in 2016, when IQUA robotics was created, University of Haifa SubSEA Engineering lab and the VISEAON Marine Imaging lab decided to acquire a Sparus II AUV. By then, the research interest and goal of the team was to work on the development of underwater marine technologies.
Part of the team, led by Morel Groper, wanted to work on dynamics, maneuvering and propulsion of underwater vehicles. And, another part of the team, led by Tali Treibitz, were willing to do research on underwater imaging and underwater computer vision. To make this happen an underwater marine platform was required. As developing a platform from scratch could take a long time, they chose to purchase a platform off the shelf tailored to their requirements.
“Sparus II was selected for several reasons: first, in order to develop technology and integrate it, a fully open-source vehicle platform, both hardware and software were necessary. Based on my previous experience, commercial platforms do not provide open source and it is nearly impossible to integrate new, self-developed technologies into them. Secondly, by purchasing from a company that was created from an academic lab, we assumed our requirements and needs would be better understood. And, finally, our goal was to find a two-man portable light platform that would let us conduct experiments more easily without needing a large, expensive surface support platform” says Mr. Groper when asked about the decision of purchasing Sparus II platform.
It is important to realize, however, that working with new technologies requires adaptation, as the University of Haifa team was not only willing to operate Sparus II but also to adapt it to their research needs. “This adaptation was easier with IQUA support and specifically, the personal relationships that both engineering teams, from Haifa and IQUA established. By establishing direct dialogue routes, we were able to use the vehicle for the projects we desired.”
ALICE, the name that is used locally to name University of Haifa’s Sparus II, is a key member of the research lab, having greatly benefited the team’s capabilities in underwater marine technologies. “ALICE is a platform suitable for research and development, specifically for self-developed technology. It possesses significant engineering abilities. We would only wish that she was slightly smaller for easier operation and lower costs.” The reconfigurable capabilities of IQUA’s vehicles are highly valued by the customers of the scientific community since they can perform their research building upon an already reliable technology.
But, which are the main changes that the Haifa team has performed on Alice? “A significant number of technologies were developed and embedded into ALICE. For high resolution 3D seabed surveys a dedicated imaging payload was developed. As demanded for visual surveys in confined spaces, the propulsion system was enhanced by the addition of two thrusters to allow sway and uncoupled yaw motions. As part of the EU project DeeperSense a novel payload combining a forward looking camera and a forward looking sonar is currently developed.In the future, we plan to keep using ALICE to develop additional technologies, test concepts and promote our research.”
This has been the use case of ALICE, the eldest Sparus II AUV manufactured by IQUA, a very special AUV that started its journey back in 2017 and that has already boosted University of Haifa’s underwater marine technologies development.
Last November we successfully delivered the SPARUS II AUV of the Intelligent Robotics Group at Aberystwyth University, one of the largest and best-known robotics research groups in the UK. Within Aberystwyth Computer Science they have a portfolio of autonomous vehicles, both land- and sea- based. These range from autonomous truck-like vehicles, through amphibious vehicles to sailing robots. The recent purchase of a SPARUS II has been their first venture into the underwater domain. They have named it Afanc, beaver in Welsh language, after a mythical lake monster.
Their unit is fully equipped with the Teledyne RDI Explorer DVL, an Evologics modem with USBL, the Imagenex Blackfin side scan sonar and a high sensitivity camera system with its lightning system developed by IQUA that they plan to use for underwater mapping and modelling of seafloor structures and plants.
Due to COVID situation, the on-site training for the team has not yet been possible but a series of online sessions and tutorial videos will help the team with the first steps with the AUV. We expect to see their first results in the near future, as soon as the situation is stabilized in the UK.
National Oceanography Centre (NOC) is the United Kingdom’s centre of excellence for oceanographic sciences. Back in 2018, NOC team chose IQUA’s SPARUS II platform to become a test bed for new developments that may be later transferred to other vehicles in their fleet. The team picked this AUV for its versatility, its ROS driven software and its possibilities for sensors integration.
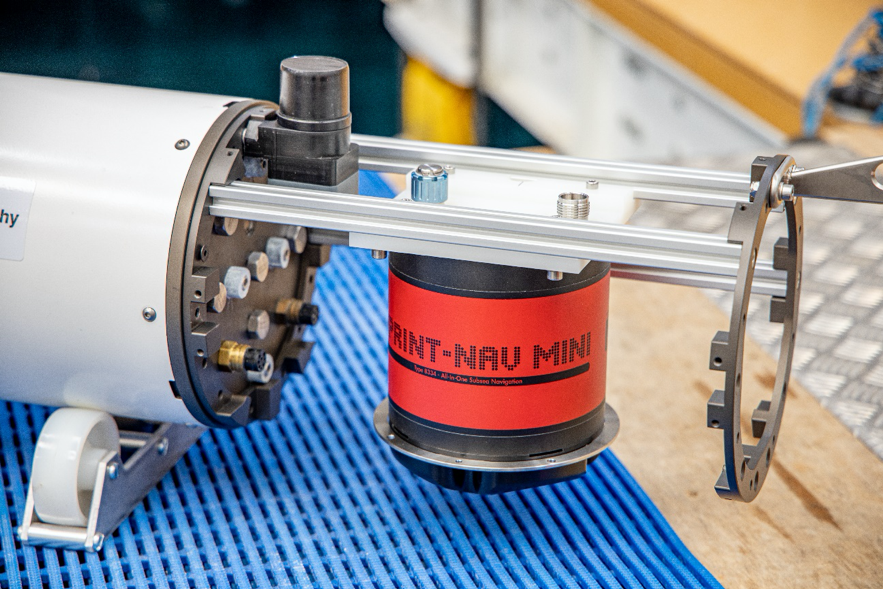
In this case, NOC team has closely worked with Sonardyne, a global provider of underwater acoustic, inertial, optical and sonar technology. As part of the launch activities for SPRINT-Nav Mini Sonardyne installed its 300 m-rated SPRINT-Nav Mini into IQUA robotics’ 9” SPARUS II AUV, which was on loan to Sonardyne from the National Oceanography Centre (NOC). The SPRINT-Nav Mini is the world’s smallest hybrid acoustic-inertial navigator, combining DVL, inertial and depth in a single all-in-one solution ideally suited for smaller subsea vehicles.
The vehicle is used as an embedded development test bed by the NOC and is permanently equipped with a Sonardyne AvTrak 6 OEM Nano, which is housed inside the main SPARUS II payload hull. The AvTrak 6 OEM Nano allows the NOC to efficiently and simultaneously track, send position updates and exchange data with the SPARUS II vehicle, using a Ranger 2 Ultra-Short BaseLine Positioning system and Sonardyne’s Marine Robotics pack.
The team at NOC regularly works with Sonardyne and IQUA to integrate systems into the robot operating system (ROS) architecture that is being rolled out across its fleet of AUVs. This has recently involved the integration of SPRINT-Nav, AvTrak 6 and a NORBIT WBMS-FLS into their vehicle control system.
Post developed in collaboration with National Oceanographic Centre and Sonardyne International.
The Intelligent Robotic Autonomy and Perception (IRAP) Lab at KAIST, leaded by Dr. Ayoung Kim, focuses on robotics problems in civil and environmental engineering applications. Their main research interest and topics include perception-based environment mapping, intelligent sensor fusion, decision making and control of the robotic agents, robotic operation and navigation in GPS-denied environments (e.g., underwater, indoor).
KAIST team chose SPARUS II to be their first platform to start with autonomous underwater robotics for its open approach (ROS driven and reconfigurable hardware). Their current work consist on the integration of a Teledyne Blueview M-900 in the AUV payload area for the obtention of underwater acoustic images with the goal of the detecting objects in the seafloor. In the integration process, KAIST researchers collaborated with Prof. Lee (Kongju University), Dr. Park (ETRI) and Korean Research Institute of Ships and Ocean Engineering (KRISO).
The Teledyne Blueview M-900 is a multibeam imaging sonar which is very compact, and allows an easy integration in SPARUS II payload area.
Our customer’s opinion: “The Sparus II is a very research-friendly platform, perfect for robotics students to get used to underwater robots. Integration and data collection were smooth due to the flexibility of the platform.”
The National Oceanography Centre (NOC), the United Kingdom’s centre of excellence for oceanographic sciences, works with SPARUS II as one of their software-testing platforms.
One of the main features of IQUA’s platforms is that they have an open conception, both in terms of hardware (reconfigurable) and software (using ROS operating system). These characteristics brought the Marine Autonomous and Robotic Systems team at NOC to acquire a SPARUS II platform to be used as a testing platform for their software.
In the last months, the team of engineers at IQUA has developed a tailor-made payload for NOC’s SPARUS II, integrating the NORBIT WMS-FLS according to the customer’s needs. This forward looking sonar will be used by Autosubs in challenging applications such as under-ice missions. SPARUS II will be used as a software-testing platform for the testing the algorithms and deciding the best sensor configurations and control strategies.
NOC undertakes world leading research in large scale oceanography and ocean measurement technology innovation. They work with Government and business to turn great science and technology into advice and applications. The NOC supports the UK science community based in universities and smaller research institutes with scientific facilities, research infrastructure and irreplaceable data assets – enabling the UK to harness the full power and diversity of its scientific talent in ocean science.