From the 5th to the 16 of May 2025 the Spanish Navy hosted the multinational exercise SPANISH MINEX-25 that took place in the Balearic Islands waters.
SPANISH MINEX is an annual exercise that takes place in Palma (Spain) with the aim of testing systems in a collaborative environment for Mine Countermeasures (MCM). Organized by the Armada, the exercise included this year the participation of Belgium, USA, France and Italy, amongst others. This year we had the chance to actively participate in SPANISH MINEX alongside our clients, the Spanish Navy (Armada) and the University of the Balearic Islands (UIB).

Figure 1. SPARUS II AUV ORAT surfacing after its mission in front of Porto Pi area (Mallorca).
The Armada was operating the two SPARUS II AUV units that they acquired back in 2023 for MCM applications. Besides autonomous underwater vehicles, the Spanish Navy tested underwater detection systems on board of its vessels together with divers specialized in mine neutralization.

Figure 2. Part of the AUVs that participated in SPANISH MINEX-25.
SPARUS II AUV ORAT is one of the most recent units that we have manufactured, it is the second unit of UIB fleet and it was conceived to be a multimodal mapping platform. With an improved navigation system incorporating an Exail INS, ORAT’s payload is composed by a multibeam echosounder from Norbit, a side scan sonar from Atlas Marine Sonic and a stereo camera system with lights developed by the IQUA team and especially designed for this particular payload configuration. Our team operated the vehicle together with the team of engineers at the UIB with the aim of testing the unit in a realistic scenario for MCM.

Figure 3. SPARUS II AUV ORAT configuration.
The results obtained prove the capability of the vehicles for gathering accurate data in an efficient manner, allowing the team to produce multiple complementary maps of the seafloor, automatising part of the mine detection process.

Figure 4. Shipwreck area mapped using multi beam and side scan sonar.

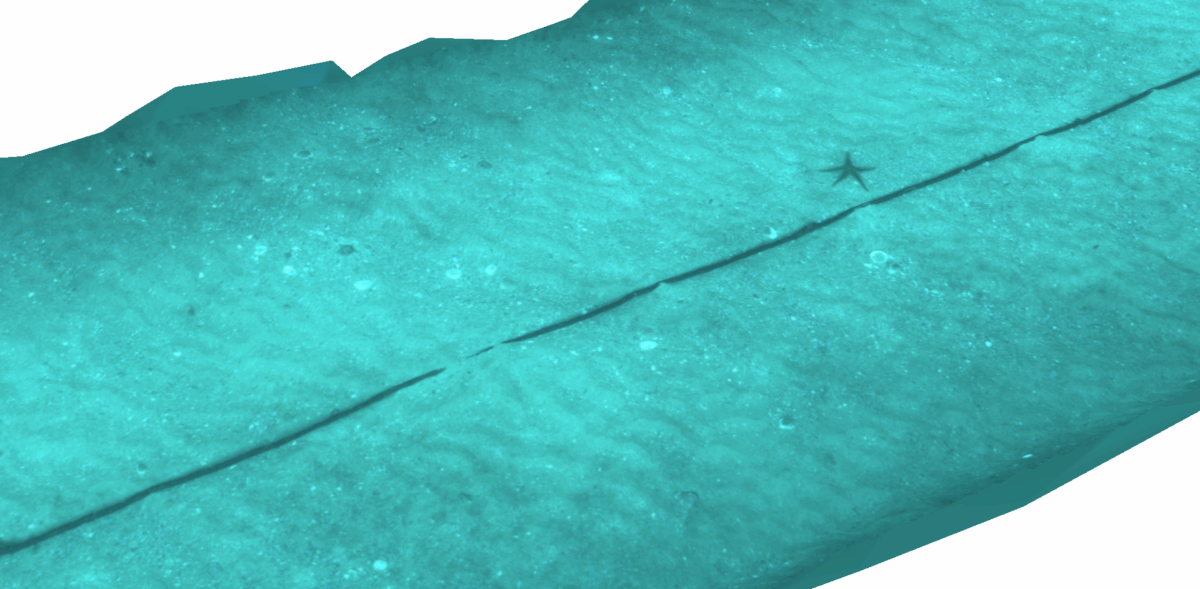
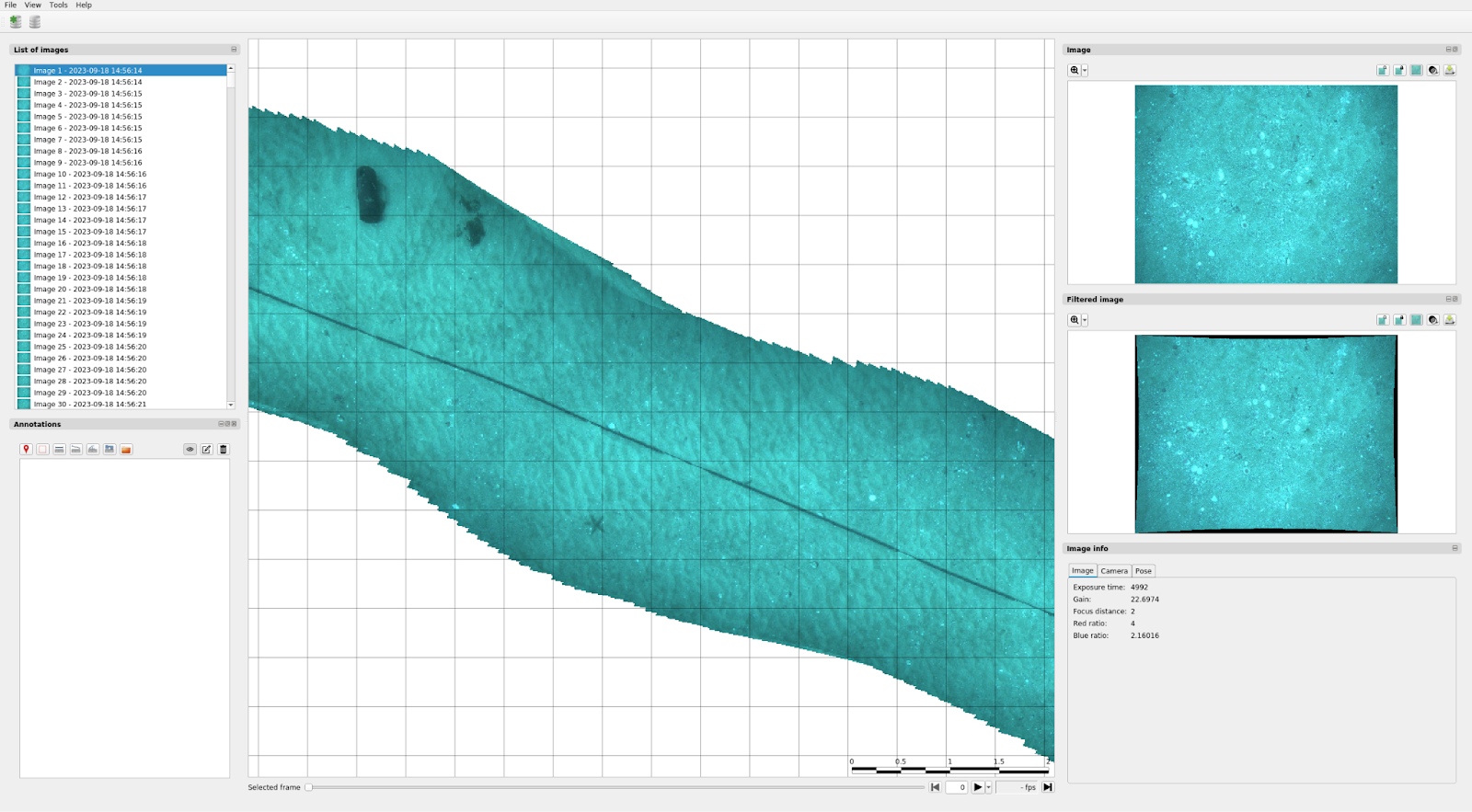
Figure 5. Sewage pipe area mapped using side scan sonar, multi beam and stereo camera system.
Sources:
Spanish Navy