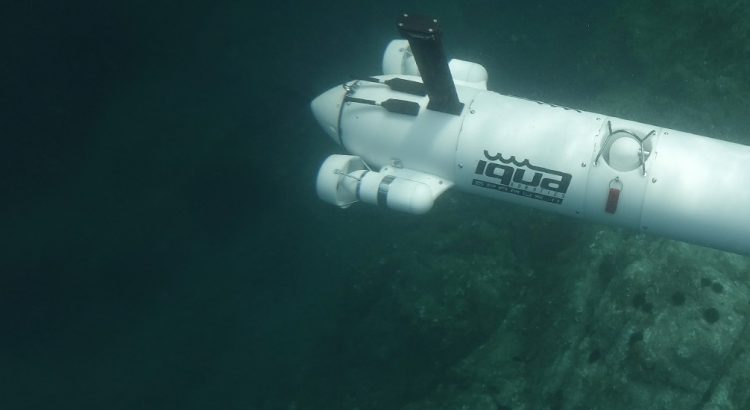
With customizable payload area and ROS-based open software architecture.
With customizable payload area and ROS-based open software architecture.
| Cookie | Duration | Description |
|---|---|---|
| CONSENT | 2 years | This cookie is set by Youtube to detect if the user has accepted the website's marketing cookies. |
| cookielawinfo-checkbox-analytics | 11 months | The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Analytics". |
| cookielawinfo-checkbox-marketing | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Marketing". |
| cookielawinfo-checkbox-necessary | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary". |
| cookielawinfo-checkbox-preferential | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Preferential". |
| PHPSESSID | Session | This cookie preserves the user's session during the navigation through the website. |
| viewed_cookie_policy | 11 months | The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data. |
| Cookie | Duration | Description |
|---|---|---|
| _ga | 2 years | This cookie records the unique ID that is used to generate statistical data about how a visitor uses the website. |
| _gat | 1 day | This cookie controls the request rate. |
| _gid | 1 day | This cookie records the unique ID that is used to generate statistical data about how a visitor uses the website. |
| Cookie | Duration | Description |
|---|---|---|
| VISITOR_INFO1_LIVE | 179 days | This cookie estimates the duration of users' browsing on websites with YouTube videos. |
| YSC | Session | This cookie records a unique ID to keep statistics of viewed YouTube videos. |
| yt-remote-cast-available | Session | This cookie stores YouTube video playback preferences. |
| yt-remote-cast-installed | Session | This cookie stores YouTube video playback preferences. |
| yt-remote-connected-devices | Persistent | This cookie stores YouTube video playback preferences. |
| yt-remote-device-id | Persistent | This cookie stores YouTube video playback preferences. |
| yt-remote-fast-check-period | Session | This cookie stores YouTube video playback preferences. |
| yt-remote-session-app | Session | This cookie stores YouTube video playback preferences. |
| yt-remote-session-name | Session | This cookie stores YouTube video playback preferences. |
| yt.innertube::nextld | Persistent | This cookie records a unique ID to keep statistics of viewed YouTube videos. |
| yt.innertube::requests | Persistent | This cookie records a unique ID to keep statistics of viewed YouTube videos. |
| ytidb::LAST_RESULT_ENTRY_KEY | Persistent | This cookie stores YouTube video playback preferences. |