The ESCABVENTS project, developed by the company IQUA Robotics in collaboration with the Zamakona Yards shipyard, has successfully concluded its proof of concept tests, demonstrating the viability of using Autonomous Underwater Vehicles (AUVs) for naval inspection tasks. This initiative, integrated into the Sail2future project, seeks to improve efficiency and safety in the preventive maintenance of vessels. The project has been funded by the European Union – NextGenerationEU through the PERTE NAVAL aid managed by the Spanish Ministry of Industry, Trade and Tourism, within the Recovery, Transformation and Resilience Plan.
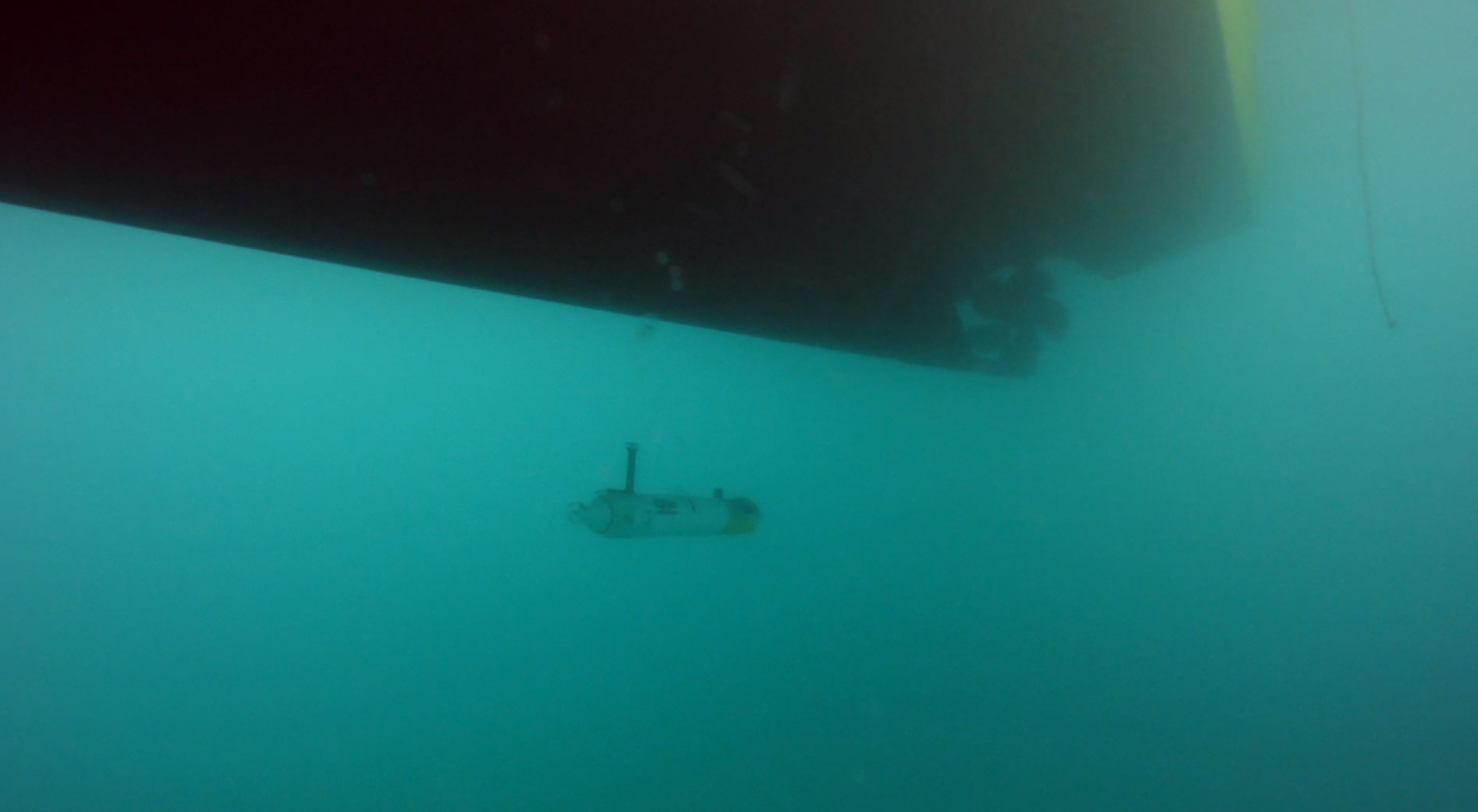
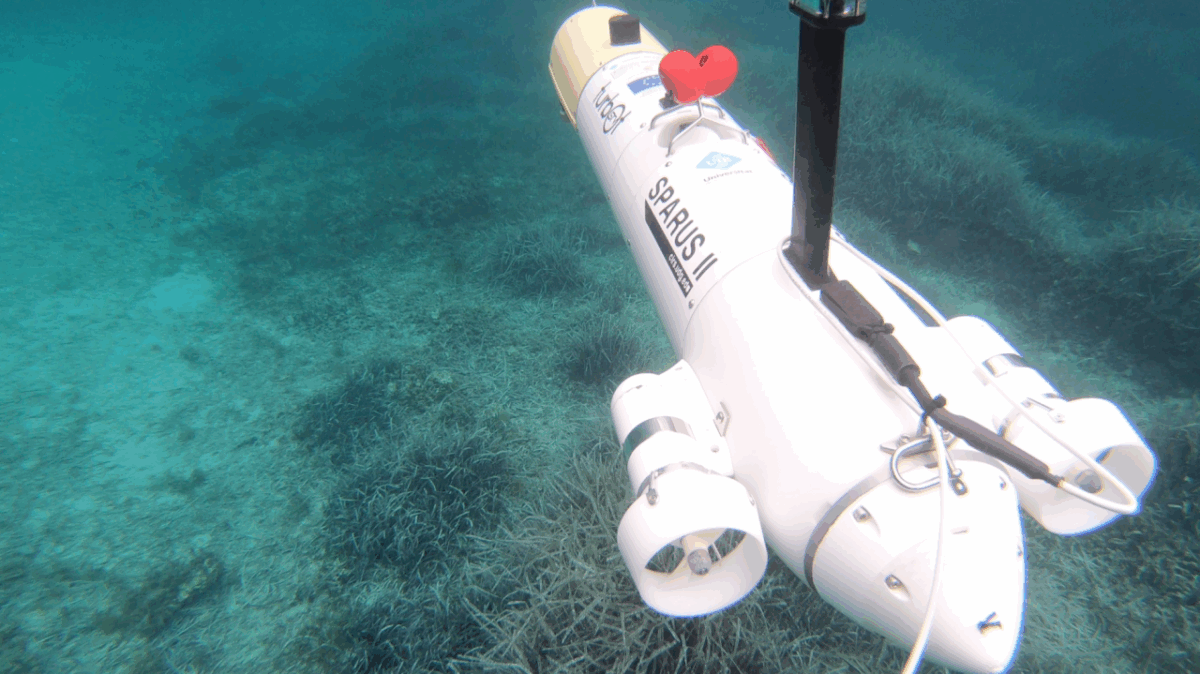
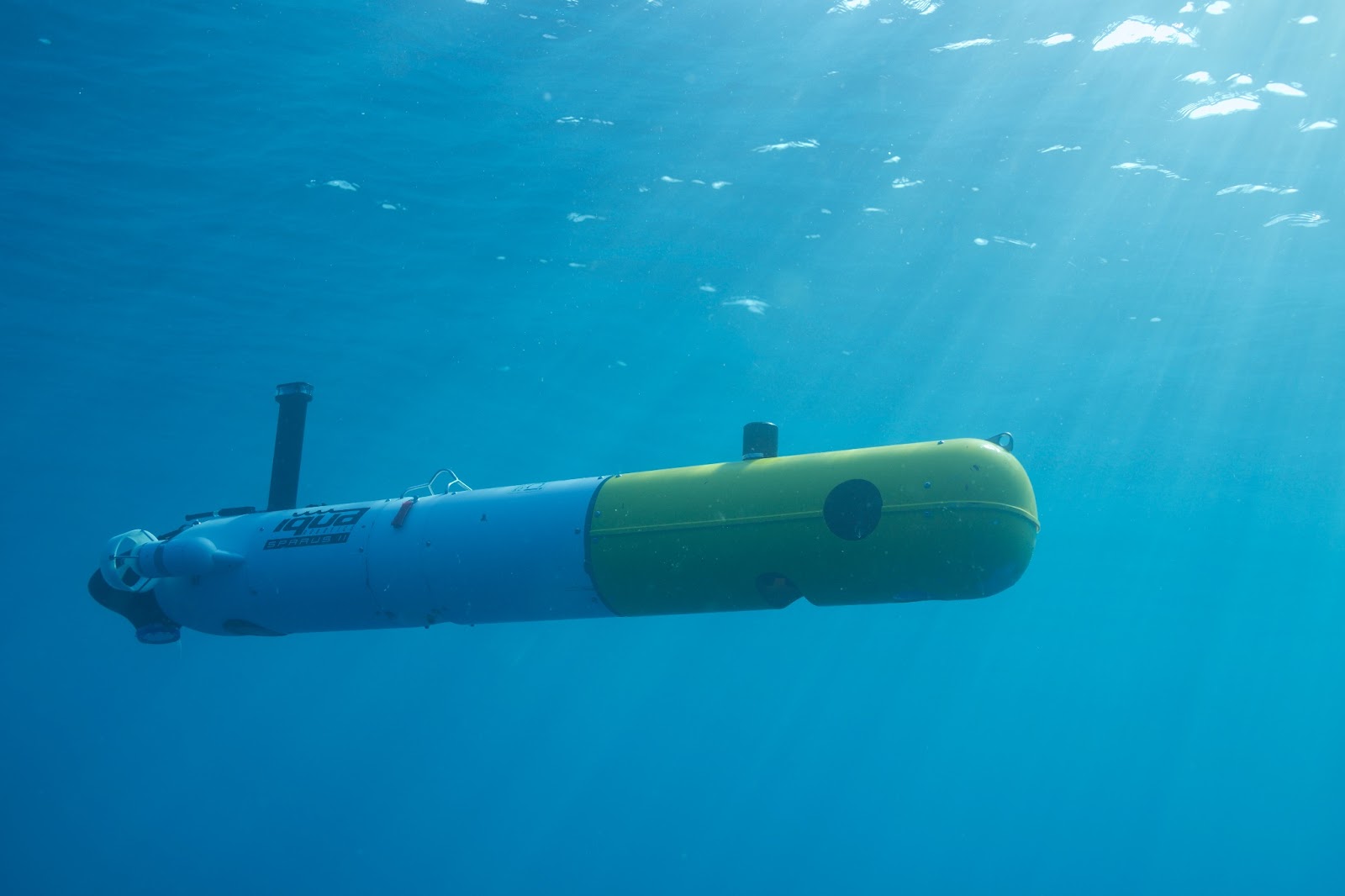
Image 1. Underwater view of the robot following its trajectory below the vessel to collect hull information.
Advances in autonomy and data capture
The research has focused on overcoming the limitations of current methods, which usually rely on divers or tethered robots (ROVs). The use of an autonomous vehicle like the Sparus II AUVallows for systematic hull scanning without direct intervention from an operator in piloting.
Throughout the project, several key technical capabilities have been validated:
Adaptive tracking: The vehicle uses a multibeam sonar to detect the hull profile in real-time, adjusting its navigation to maintain a constant distance.
Systematic navigation: The system executes adaptive “lawnmower” type trajectories that ensure complete and uniform coverage of the inspected area to collect hull images.
Operational safety: Protocols have been implemented that allow the vehicle to perform automatic escape maneuvers towards free zones in case of experiencing a failure and ensure that the vehicle does not get trapped under the hull
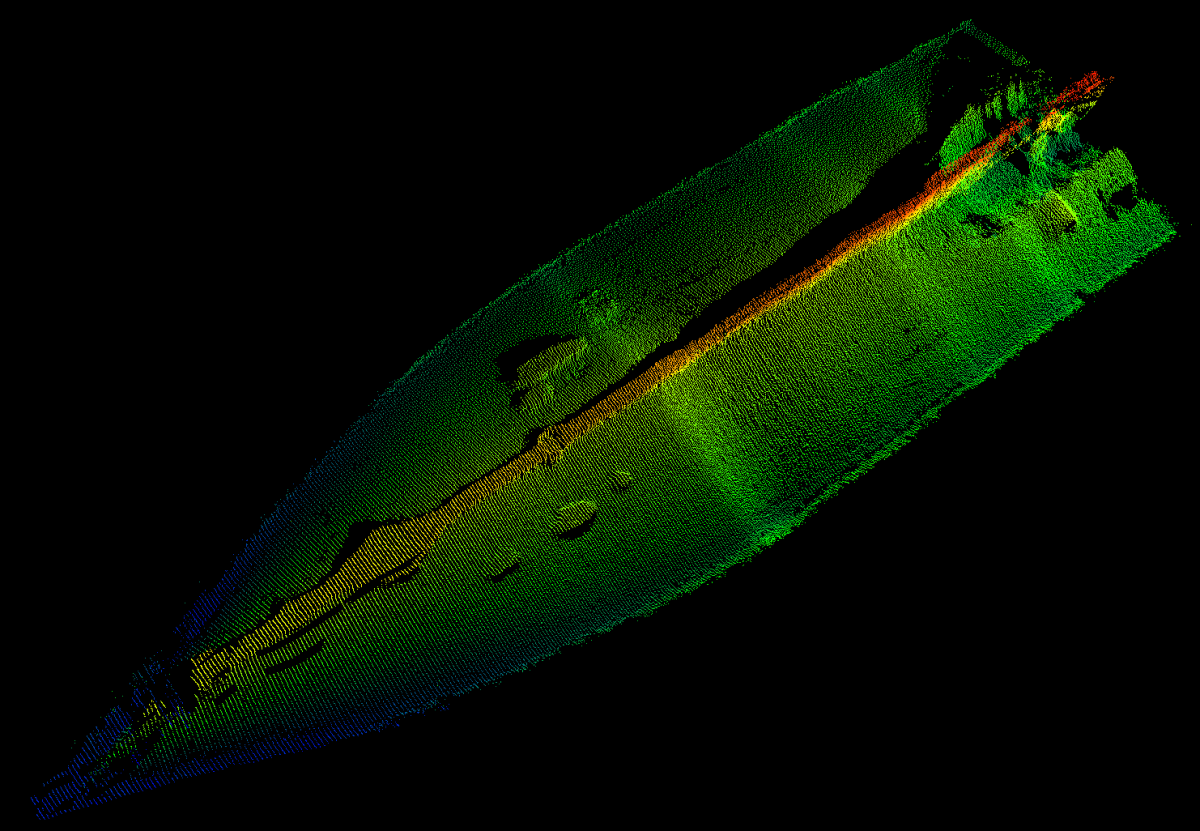
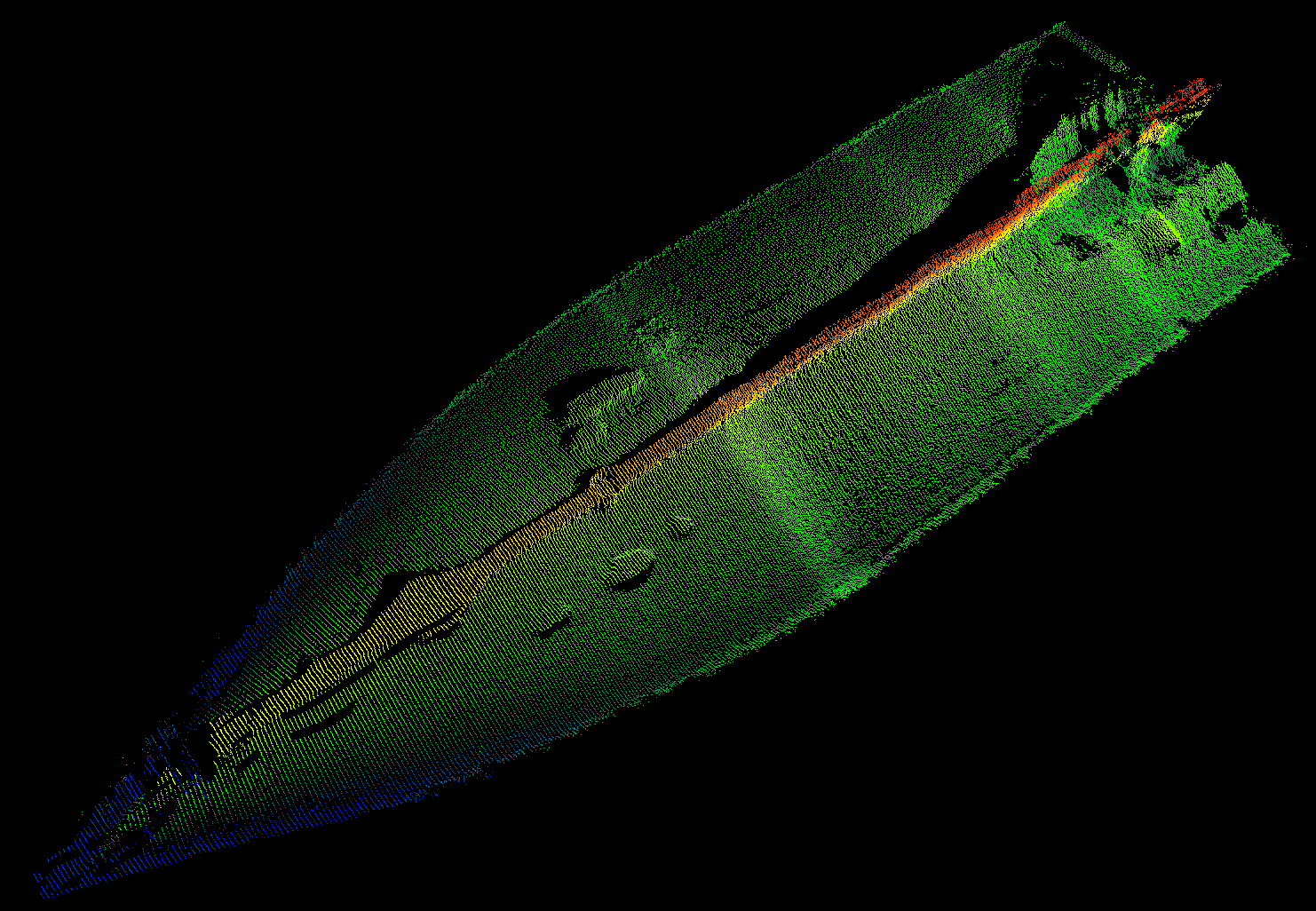
Image 2. 3D point cloud of the same vessel’s hull obtained from Norbit multibeam sonar data.
Results and practical applications
Experimental tests, carried out in collaboration with the Zamakona Yards shipyard and the staff of Reparaciones Navales Canarias, have been fundamental to validate the system in real port environments. These campaigns allowed the collection of multiple datasets on four vessels of different types, including fishing, research, and defense ships. The results show that it is possible to obtain 3D reconstructions with centimetric resolution, facilitating the identification of corrosion, marine fouling (biofouling), or paint damage.
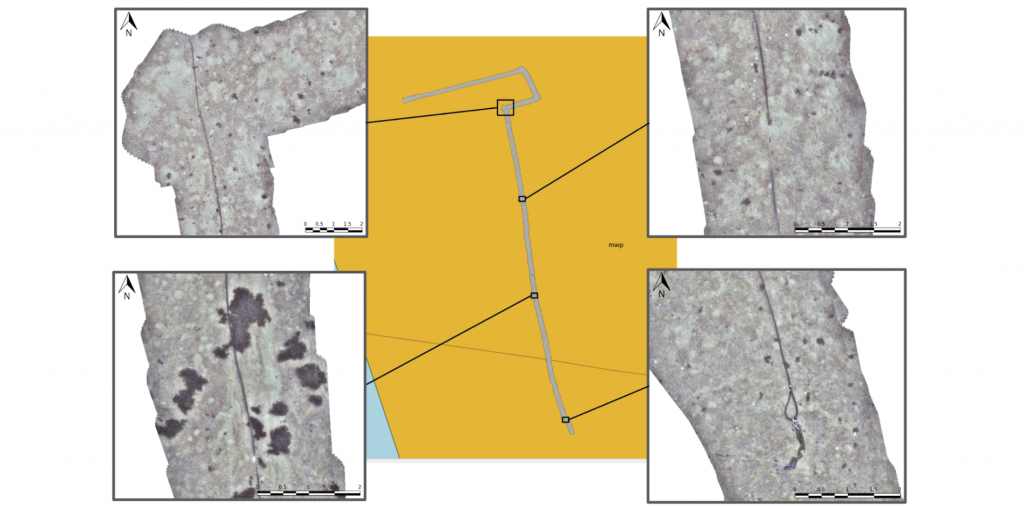
Image 3. 3D reconstruction obtained through the autonomous inspection system developed by IQUA Robotics
Next steps toward specialization
Although the system has proven effective in the uniform sections of the hull, research has identified challenges in areas of complex geometry, such as the stern (propellers and rudders), where acoustic reflections complicate automatic tracking. Likewise, difficulties have been detected in taking images of the sides of the vessel, as the high light contrast of the surface causes underexposure in these areas. Therefore, future technical steps include:
The design of new payloads with multi-camera systems and artificial lighting to improve visual quality.
The exploration of 3D sonars to anticipate abrupt changes in the vessel’s profile and improve the vehicle’s control response.
In addition to industrial maintenance, this technology is expected to be applicable in port security for the inspection of critical infrastructure or the detection of threats and contraband adhered below the waterline.
REPMUS – Robotic Experimentation and Prototyping using Maritime Uncrewed Systems – exercise took place one more year in Lisbon’s southern coastal area during September 2025, hosted by the Portuguese Navy. With the participation of multiple NATO countries, this experimental setup allows different market stakeholders to test their technologies in several realistic scenarios.
For the fourth year in a row, IQUA Robotics participated in REPMUS25 at the invitation of the Spanish Navy. The company deployed its SPARUS II UUV in two key exercises: mine countermeasures (MCM) and critical underwater infrastructure (CUI). Besides, the team collaborated with the Spanish Navy, the US Navy and Thales Group to test interoperability capabilities in the framework of STANAG 4817.
Setup
This year, IQUA participated in REPMUS with SPARUS II equipped with a forward-looking sonar (FLS) from Blueprint Subsea, a multibeam echosounder (MBES) from Norbit, and a vision system developed by IQUA Robotics in the payload area.
Figure 1. Render of SPARUS II UUV configuration for REPMUS25
The vehicle used had the following advanced capabilities:
Automatic target detection on low-frequency FLS images.
Real-time planning of reacquisition trajectories upon a detection.
Multimodal contact mapping: acoustic imaging with high-frequency FLS, 3D profiles with the multibeam sonar, and optical imaging of inspected contacts.
Onboard generation of optical maps of inspections for rapid review at the end of a mission.
STANAG 4817 for interoperability.
Semi-automatic APP-11 report generation.
MCM scenario: detection, reacquisition and identification
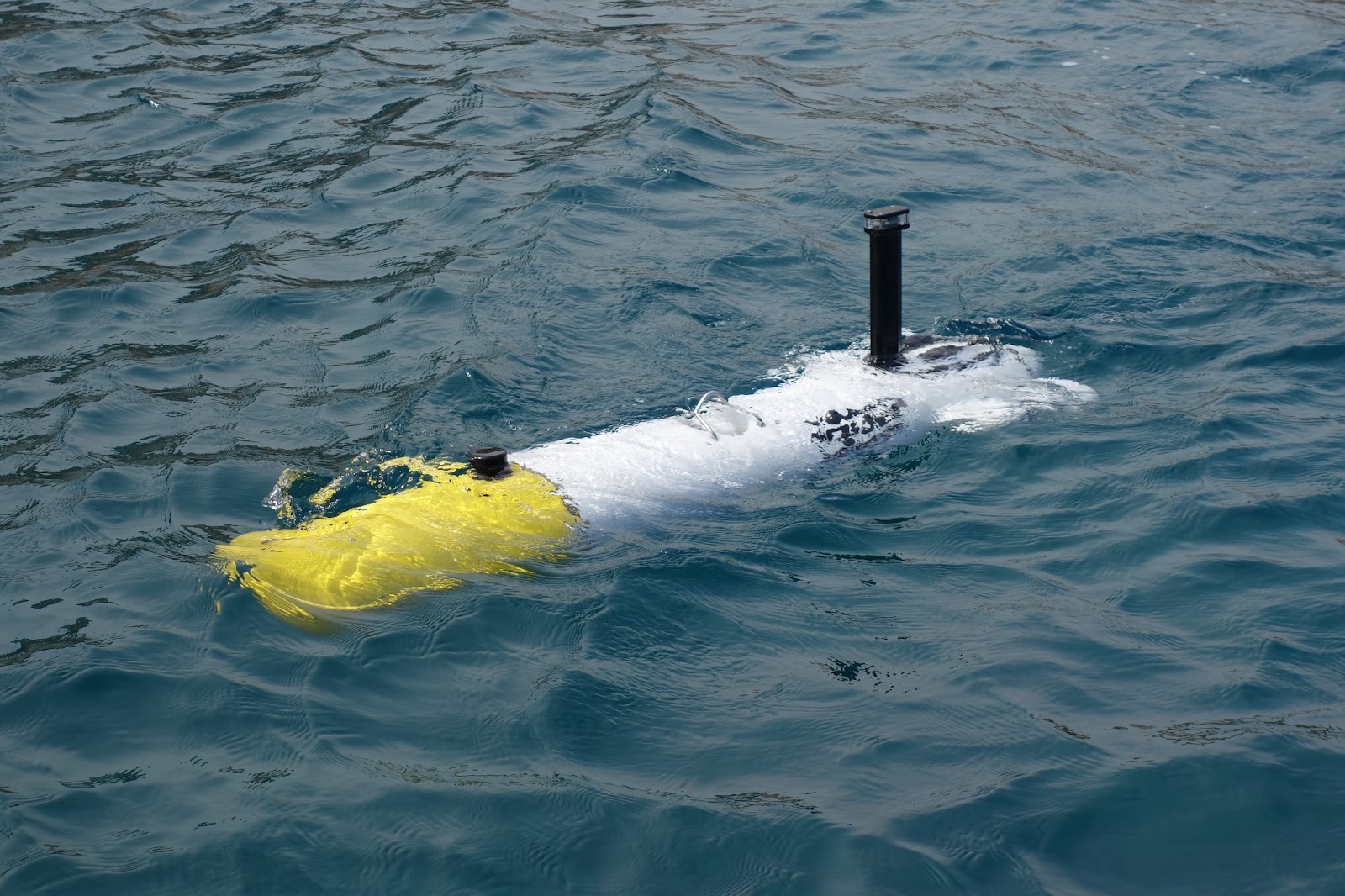
Figure 2. SPARUS II UUV deployed in the MCM testing area
Motivation
Mine Countermeasure (MCM) operations are critical for ensuring the safety and freedom of navigation in both military and civilian maritime domains. Advanced MCM capabilities enable the detection, classification, and neutralization of these threats, reducing operational risk and protecting human lives and assets.
With the increasing complexity of mine designs and the expanding use of unmanned systems, there is a growing need for innovative technologies that combine efficient area coverage, accurate target identification, and rapid decision-making. Autonomous vehicles equipped with multimodal sensors and intelligent algorithms offer a transformative approach to MCM, enabling faster and more effective detection and classification of underwater threats.
Approach
IQUA Robotics’ SPARUS II vehicle tested its approach for mine detection and identification, by conducting multiple surveys in the designated naval mine warfare areas of REPMUS25 exercise.
The MCM approach is designed to combine detection and reacquisition in a single mission. For each task, a predefined survey trajectory was programmed to cover the area while scanning with the FLS at low frequency. An automatic detector was responsible for identifying potential contacts in the incoming FLS images, pausing the predefined trajectory, and replanning in real time a reacquisition maneuver to collect close-range data on the potential contact, including optical camera images, high-frequency FLS images, and multibeam profiles. After each reacquisition, the vehicle resumed the predefined path and continued scanning for additional potential contacts until the trajectory was completed. With this approach, by the end of the mission, the vehicle has collected all the necessary information to perform identification of the detected objects.
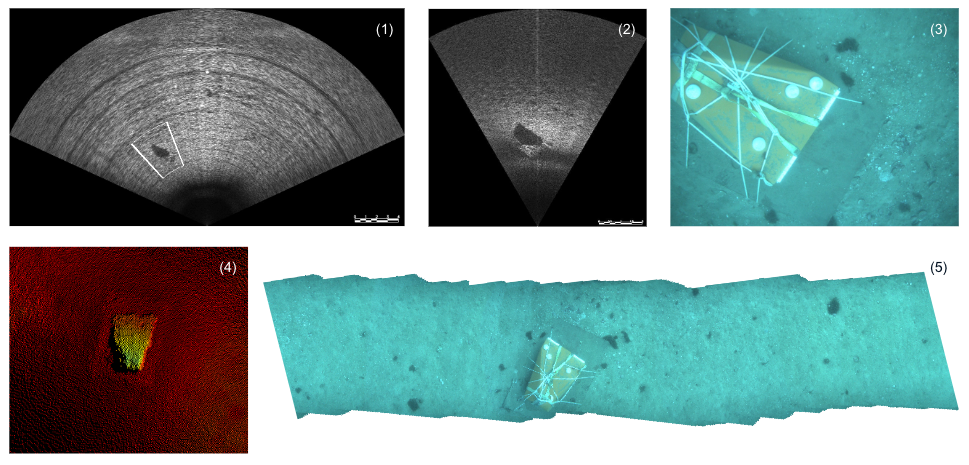
Figure 3: Example of results generated when a contact occurs: (1) Low-frequency forward-looking sonar image where detection occurred. (2) High-frequency forward-looking sonar image. (3) Optical image. (4) Multibeam sonar point cloud. (5) Optical mosaic of reinspection trajectory.
The onboard capability to generate optical maps of the inspections proved to be particularly useful. This allowed the reacquired areas to be quickly reviewed as soon as the vehicle surfaced, enabling the confirmation of potential contacts at a glance without the need to download all the inspection images and identify the ones that passed over the target in question.
CUI: detecting, tracking and mapping
Figure 4. IQUA team operating the SPARUS II UUV from the operations RHIB.
Motivation
Monitoring underwater critical infrastructure is essential for national security and economic stability. Subsea cables, pipelines, and energy systems form the backbone of global communications, finance, and energy supply, making them prime targets for sabotage or disruption. Their remote and often complicated locations, combined with the technical complexity and high costs of reaching underwater areas, make them difficult to protect and, as a consequence, highly vulnerable.
Advanced technical monitoring—using sensors, autonomous underwater vehicles, sonar, and real-time data analytics—enables early detection of tampering, natural hazards, or system failures. These capabilities allow for rapid response to minimize damage and maintain operational capacities. As undersea technologies evolve, safeguarding these assets through technical innovation also becomes a critical element of geopolitical competition, ensuring nations can protect vital networks, deter threats, and preserve trust in the systems that underpin modern society.
Approach
IQUA Robotics’ SPARUS II vehicle tested its approach for cable detection and tracking in the designated shallow CUI area during the REPMUS25 exercise.
In this edition, unlike previous years where sonar-based detectors were used, a new optical detector and tracker was evaluated for the localization and mapping of a cable within the designated area using camera images.
An initial low-density “lawn-mower” survey was programmed to cover the area, with the goal of crossing and locating the cable. At a certain point during this mission, the vehicle detected the cable in the incoming images, and tracking was automatically activated without human intervention. The vehicle then followed the cable in one direction until reaching its end, adjusting along slight bendings to maintain it in sight. Subsequently, the mission was repeated with the tracking behavior in the opposite direction, achieving a complete mapping of the cable.After the mission, all collected data was used to generate a map where all the cable can be seen. A total length of 280m was automatically tracked and mapped.
Figure 5. Trajectory mosaic and details of the mapped cable. At the beginning, the vehicle was performing a lawn-mower search pattern. In the middle of the second transect, the cable was detected, and the vehicle initiated automatic following.
STANAG 4817 interoperability
Figure 6. Collaboration between the teams of the US Navy and IQUA Robotics, with their corresponding assets REMUS and SPARUS UUVs.
Motivation
The primary motivation for STANAG 4817 is to enable multi-domain control of unmanned systems across NATO by establishing a common, interoperable framework for command and control (C2) of unmanned aerial, surface, and underwater vehicles (UxV). This standard facilitates the coordinated operation of diverse unmanned platforms by a single operator or a distributed network of operators, which is crucial for complex, multinational operations in compromised environments and for improving mission effectiveness, data sharing, and overall interoperability within the alliance.
In this year’s REPMUS, the SPARUS II UUV was upgraded to use the latest available STANAG 4817 protocol specification, enabling not only status reporting but also allowing it to be tasked by third-party assets. STANAG 4817 interoperability was successfully validated through two separate tests with the United States Navy and the THALES Group, in which SPARUS II acted as the vehicle for target reacquisition and identification.
Approach
In the first case, the US MK18 REMUS vehicle was used to scan two areas with potential targets. During the operation, a reacquisition task in the first area was issued via the 4817 protocol. Upon reception at IQUA’s control station, a mission was automatically generated for SPARUS II to reacquire the designated contacts. A key aspect of this collaboration was the rapid response time and task parallelization: in less than 20 minutes from task reception, SPARUS II had reacquired the two contacts and captured optical images confirming their nature, while the detection vehicle continued scanning the remaining assigned areas.
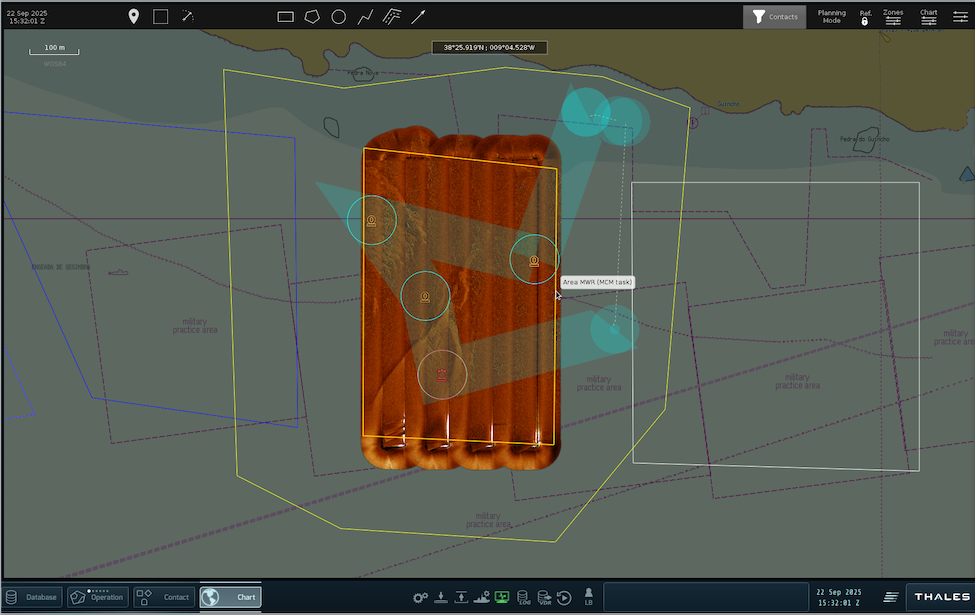
Similarly, a collaboration was carried out with THALES. Using their M-Cube Mission Management system, SPARUS II was tasked with reacquiring four contacts in a specific area. The task was received while the vehicle was in transit, and IQUA’s system automatically planned a reacquisition trajectory to cover all contacts.
Figure 7. Screenshot of the Thales M-Cube system during the generation of the task for Sparus II to inspect four contacts.
Summary
IQUA Robotics successfully participated in REPMUS 2025, deploying its SPARUS II UUV in mine countermeasures (MCM) and critical underwater infrastructure (CUI) exercises. Once again, collaboration with the Spanish Navy enabled us to participate and achieve successful results. SPARUS II, equipped with advanced sonars and a vision system, demonstrated automatic target detection, real-time reacquisition planning, multimodal contact mapping, and onboard optical map generation in MCM scenarios. For CUI, a new optical detector and tracker enabled autonomous cable localization and mapping, with 280m of cable successfully tracked. Additionally, IQUA Robotics validated STANAG 4817 interoperability by integrating the SPARUS II with US Navy’s MK18 REMUS and THALES Group’s M-Cube system for target reacquisition and identification, showcasing rapid response and task parallelization in a multinational setting.
Figure 8. Collaboration between the Spanish Navy and IQUA Robotics, with all UUVs participating in REPMUS25
Micro and small-sized AUVs can integrate a wide range of sensors and navigation systems, making them ideal for applications in littoral waters due to their ease of deployment and operation. However, effectively exploring, locating, and mapping survey targets often requires combining multiple sensing techniques. Additionally, close-range, high-resolution inspection—traditionally performed by a secondary vehicle like an ROV—is highly desirable.
Figure 1: SPARUS II hovering AUV mapping a rocky area during a survey mission.
The difficulties of conducting and repeating sea campaigns, coupled with technological advancements, have driven the development of AUVs with multimodal perception payloads and hovering capabilities, enabling simultaneous exploration, surveying, and inspection. The SPARUS II AUV from IQUA Robotics embodies these characteristics and can be equipped with a comprehensive and complementary suite of sensors, including acoustic (sidescan sonar, multibeam echosounder, or forward-looking sonar), optical, and magnetic sensors, as well as precise navigation systems and sensors for measuring water parameters.
Figure 2: Payload for multimodal mapping: Teledyne RDI Pathfinder 600 DVL, Exail Phins C3 INS, Norbit WBMS MBES, Atlas Marine Sonic MKII 900 kHz sidescan sonar, and IQUA Robotics stereo camera system.
Thanks to its ease of deployment and recovery, simple operation, and streamlined processing pipelines, SPARUS II can perform consecutive missions from a support vessel, enabling a rapid cycle of data collection, analysis, and planning for successive missions based on previous findings. Sensors with broader coverage, such as sidescan sonar (SSS) or multibeam echosounder (MBES), are used to explore and locate areas of interest. The ability to acquire data from complementary sensors during the same mission —such as comparing the sonar intensity map from the sidescan sonar with the point cloud generated by the MBES— enables a more accurate interpretation of the scene. Higher-resolution sensors, such as forward-looking sonar (FLS) or optical cameras, provide detailed mapping of the scene. Additionally, the possibility to set-up a scanning trajectory that acquires data in all directions with precise control, allows to capture the necessary information for a later reconstruction of the inspected area.
Figure 3: Sewage pipe located with sidescan sonar (left), mapped at low altitude with MBES (middle), and stereo camera (right) during the same experimental deployment.
The SPARUS II AUV is designed to accommodate the latest sensor and navigation technologies. Its robust structure and sufficient power/autonomy enable it to operate in challenging maritime conditions for a full workday. This small-class AUV can reach a maximum depth of 200 meters and can be easily operated from a variety of vessels by a team of two people.
Figure 4: Top: Mapping of the same Posidonia meadow with sidescan sonar (left) and MBES (right), where the complementary acoustic image and bathymetry provide a better understanding of the area. Bottom: Rocky area mapped with SoundTiles FLS post-processing software (left) and optical camera (right).
Available software tools simplify mission planning, monitoring, and rapid data processing, allowing users to quickly analyze the AUV’s findings while it remains on the surface, ready for the next mission. Alternatively, real-time data processing can be performed onboard, directly linking environment exploration with inspection tasks when a target is automatically detected. Artificial intelligence plays a vital role here in scene recognition and decision-making.
Figure 5: Autonomous and real-time target detection and reacquisition with SPARUS II. Forward-looking sonar images (from Blueprint Subsea Oculus M1200) are processed at low frequency to detect the target, in this case, a fishing cage (top-left). After positive detection, the AUV adjusts its predefined trajectory to approach the target, reacquiring it acoustically at high frequency (top-right) and optically (bottom-left) in a multiple crossing trajectory. This enables full coverage and a 3D reconstruction in post-processing (bottom-right). Once the target has been inspected, SPARUS II resumes its trajectory to continue the survey, discovering and inspecting new targets.
In this article we want to summarize the last 10 years of history at the Systems, Robotics and Vision research lab (SRV) at the University of the Balearic Islands (UIB), always linked to their SPARUS II AUV platform named Turbot. We’ve interviewed former members of the team as well as the current generation of researchers at SRV to understand what was the impact of acquiring an AUV platform for testing technologies in their everyday research and to understand their future goals.
Back in 2014, the team at the SRV was working on its research projects on underwater vision and robotics using a tailor made remotely operated vehicle, the Fugu ROV. It was a small ROV with a small lithium battery, a pressure sensor and a couple of stereo cams pointing to the front and below, in the times when small ROV affordable platforms were not a reality yet. With four small thrusters, they were able to move the vehicle up and down and gather datasets that, unfortunately, were not always ideal to work with.
The Fugu ROV helped the team to develop new technologies, starting with a ROS based architecture and visual odometry algorithms. In parallel, a vision payload was developed for the Fugu, the Fugu-flex, that was then integrated into Nessie AUV (from Heriot Watt University) and Girona 500 AUV (from University of Girona) in the framework of the EU funded project TRIDENT.
Fugu ROV was soon too limited for a growing team of researchers that was eager to evolve in its work. M. Massot, former researcher of the SRV, remembers that times “we needed to look for a bigger autonomous vehicle, with DVL, that could handle our camera systems and with a ROS based architecture; the idea was to be able to keep the same research lines that we were working in and not having to reinvent the developed technology so far. Gabriel Oliver (the head of the research lab) introduced the idea of the SPARUS II AUV platform and, fortunately, he managed to find the funding to acquire it!”.
The arrival of the SPARUS II AUV Turbot (named after the flatfish in Catalan language) changed the lab’s everyday dynamics; having a testing AUV that allowed gathering longer datasets and the technical support of the manufacturing team, helped the SRV to focus on their research. “Buying an operative platform and not having to be worried about waypoint following, navigation, reliable control, having USBL communication solved,… helped us to focus and advance faster in the technologies we were working on”, Massot remembers.
The first vehicle that the UIB acquired was a platform equipped with a DVL from Teledyne Marine and an acoustic modem with USBL from Evologics. On top of that, it was the SRV team who built up multiple payloads using different camera systems and also used the platform as a basis to evolve in their vehicle’s ROS based achitecture. In the years of Turbot at the lab, 4 PhD theses have been defended and more than 70 articles have been published in relation to the technologies that have been tested in the SPARUS II AUV.
“I started working at SRV when they had recently purchased the Turbot. I actually joined the lab because they had an AUV where I could work hands-on and I felt that being part of that team would help me to grow professionally. Research work made us do it all together as a complementary team, the flexibility of the platform and the possibility to further build up on the work carried out, was a continuous stimulation towards testing new things. The AUV made sense and, for the first time, we could generate useful data for third parties” points out E. Guerrero, former SRV member.
F. Bonin, associate professor at the UIB, explains: “Currently, in the framework of collaborative research projects, the team is working in two main research lines: industrial applications and biological applications. In the first one, we are using the AUV for intervention in underwater infrastructure whereas in the second one we are using the AUV to gather data from the seafloor with the aim of post-processing it online and offline to extract information of the interest for the biologists. We aim to follow these research lines and keep collaborating with multiple institutions, since we see that this is the best way to grow in areas that we can contribute widely.” To that end, the SRV team has decided to purchase a new SPARUS II AUV unit, equipped with multiple sensors, in order to amplify the kind of work carried out with different kinds of data.
Recently, the UIB team decided to buy a new SPARUS II AUV unit for various reasons, she will be called ORAT (sea bream in Mallorca Catalan dialect). “We’ve been working with the SPARUS II Turbot and the experience has been very satisfying; it’s a vehicle that covers our needs both in research and in some applications for data gathering for the scientific community. The model covered our technical needs and IQUA robotics was the best candidate we had. ORAT will complement TURBOT. The first one will be devoted exclusively to data gathering to work on our post processing capabilities and also for working in cooperation with other vehicles. The latter one will be used for research that imply physical modifications of the AUV ” says Gabriel Oliver, Professor at the UIB and research lead at the SRV lab.
The new SPARUS II AUV ORAT, the first unit of a new upgraded generation of SPARUS, will have an enhanced navigation system integrating the Phins C3 Exail INS and a fully capable all-in-one payload that will contain a Norbit multibeam echosounder, a Marine Sonic side scan sonar and an IQUA Robotics developed camera system. “The incorporation of such technologies shall significantly increase the capabilities of the lab for participating in new projects. We will have more robust navigation and more precise sensors, giving to the vehicle more versatility and feasibility when gathering seafloor data” confirms G. Oliver.
Alongside with the new AUV, the UIB has acquired an autonomous surface vehicle of the brand Maritime Robotics that will provide further capabilities to the facilities at the UIB.
A few months ago, the current SRV team gathered in Palma de Mallorca (Spain) at the Martech workshop where they symbolically celebrated the 10 years of their youngest lab member who brought them a change of paradigm when most needed back in 2014 and who has opened doors that they would not had imagined when they started their research activity. Happy birthday Turbot!
Back in 2016, when IQUA robotics was created, University of Haifa SubSEA Engineering lab and the VISEAON Marine Imaging lab decided to acquire a Sparus II AUV. By then, the research interest and goal of the team was to work on the development of underwater marine technologies.
Part of the team, led by Morel Groper, wanted to work on dynamics, maneuvering and propulsion of underwater vehicles. And, another part of the team, led by Tali Treibitz, were willing to do research on underwater imaging and underwater computer vision. To make this happen an underwater marine platform was required. As developing a platform from scratch could take a long time, they chose to purchase a platform off the shelf tailored to their requirements.
“Sparus II was selected for several reasons: first, in order to develop technology and integrate it, a fully open-source vehicle platform, both hardware and software were necessary. Based on my previous experience, commercial platforms do not provide open source and it is nearly impossible to integrate new, self-developed technologies into them. Secondly, by purchasing from a company that was created from an academic lab, we assumed our requirements and needs would be better understood. And, finally, our goal was to find a two-man portable light platform that would let us conduct experiments more easily without needing a large, expensive surface support platform” says Mr. Groper when asked about the decision of purchasing Sparus II platform.
It is important to realize, however, that working with new technologies requires adaptation, as the University of Haifa team was not only willing to operate Sparus II but also to adapt it to their research needs. “This adaptation was easier with IQUA support and specifically, the personal relationships that both engineering teams, from Haifa and IQUA established. By establishing direct dialogue routes, we were able to use the vehicle for the projects we desired.”
ALICE, the name that is used locally to name University of Haifa’s Sparus II, is a key member of the research lab, having greatly benefited the team’s capabilities in underwater marine technologies. “ALICE is a platform suitable for research and development, specifically for self-developed technology. It possesses significant engineering abilities. We would only wish that she was slightly smaller for easier operation and lower costs.” The reconfigurable capabilities of IQUA’s vehicles are highly valued by the customers of the scientific community since they can perform their research building upon an already reliable technology.
But, which are the main changes that the Haifa team has performed on Alice? “A significant number of technologies were developed and embedded into ALICE. For high resolution 3D seabed surveys a dedicated imaging payload was developed. As demanded for visual surveys in confined spaces, the propulsion system was enhanced by the addition of two thrusters to allow sway and uncoupled yaw motions. As part of the EU project DeeperSense a novel payload combining a forward looking camera and a forward looking sonar is currently developed.In the future, we plan to keep using ALICE to develop additional technologies, test concepts and promote our research.”
This has been the use case of ALICE, the eldest Sparus II AUV manufactured by IQUA, a very special AUV that started its journey back in 2017 and that has already boosted University of Haifa’s underwater marine technologies development.
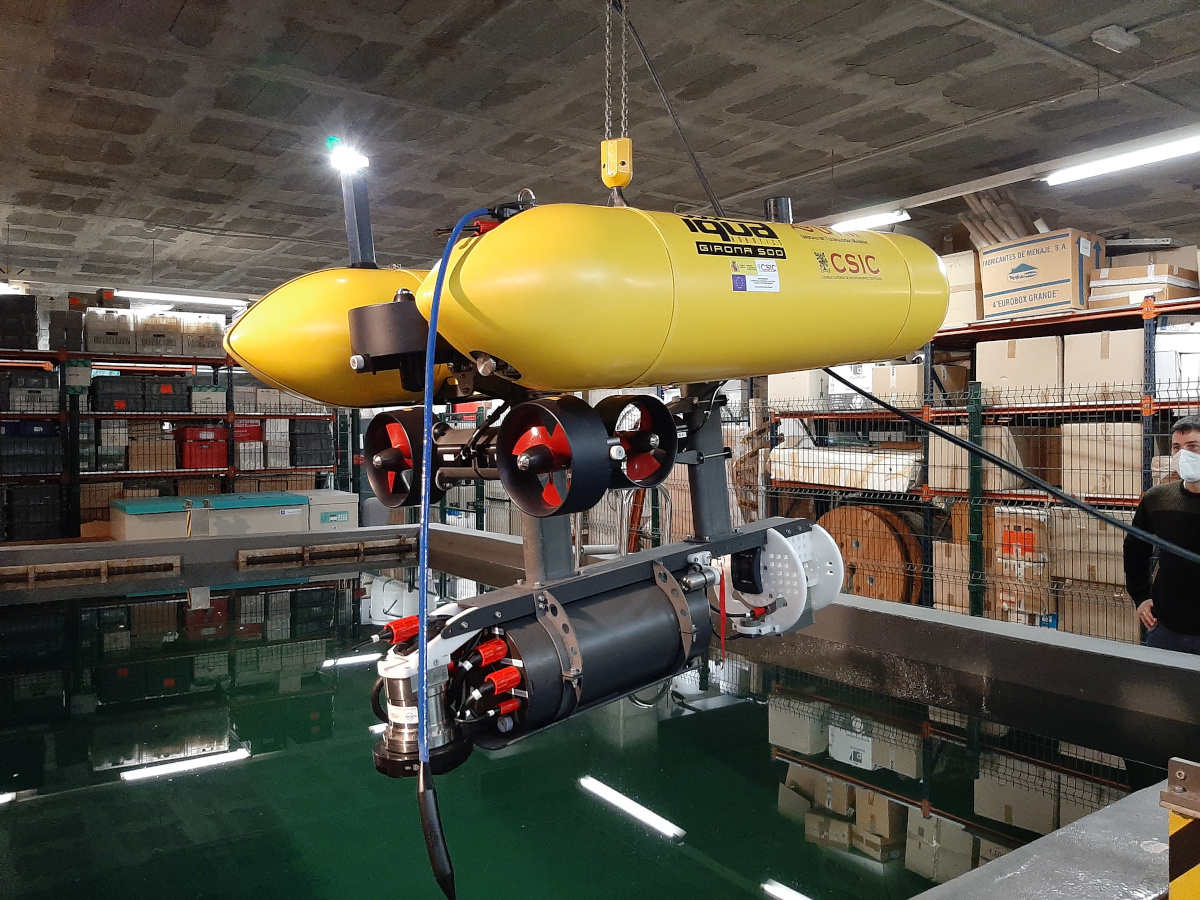
The CSIC’s Marine Technology Unit, responsible for the management of this organization’s oceanographic research vessels, is preparing a new autonomous underwater vehicle for future campaigns. It is the Girona 500 NEMO, an autonomous underwater vehicle (AUV) that can go up to 500 meters deep, designed and built by IQUA Robotics. NEMO was acquired at the end of last year and was tested for the first time in the waters of Sant Feliu de Guíxols (Girona).
Currently, the technicians of the Marine Technology Unit are preparing NEMO for carrying CTD sensors (which measure conductivity, temperature and depth), photographic cameras, current profilers and bathymetric probes. “Our vehicle has an open architecture, so it can be modified in a reasonably simple way to adapt it to user requirements and therefore explore new ways of working,” explains Pablo Rodríguez, from the UTM.
Thus, it will allow mapping underwater habitats, obtaining topographies of the seabed, of interest in the field of geology or underwater archaeology, exploring marine habitats or monitoring natural reserves. In the near future, the vehicle could also be deployed in Antarctic campaigns. NEMO has sparked interest among researchers, who are already including its use in future projects.
The Marine Technology Unit (UTM), based in Barcelona and attached to the Mediterranean Center for Marine and Environmental Research (CMIMA) of the CSIC, has the main objective of providing support to the national policy of R&&I in science and marine and polar technology. The UTM is in charge of the integral management of the Sarmiento de Gamboa Oceanographic Vessel, the logistics and technological management of the Hespérides Oceanographic Research Vessel and the integral management of the vessels García del Cid and Mytilus, as well as the BAE Spanish Antarctic Base Juan Carlos I.
Last November we successfully delivered the SPARUS II AUV of the Intelligent Robotics Group at Aberystwyth University, one of the largest and best-known robotics research groups in the UK. Within Aberystwyth Computer Science they have a portfolio of autonomous vehicles, both land- and sea- based. These range from autonomous truck-like vehicles, through amphibious vehicles to sailing robots. The recent purchase of a SPARUS II has been their first venture into the underwater domain. They have named it Afanc, beaver in Welsh language, after a mythical lake monster.
Their unit is fully equipped with the Teledyne RDI Explorer DVL, an Evologics modem with USBL, the Imagenex Blackfin side scan sonar and a high sensitivity camera system with its lightning system developed by IQUA that they plan to use for underwater mapping and modelling of seafloor structures and plants.
Due to COVID situation, the on-site training for the team has not yet been possible but a series of online sessions and tutorial videos will help the team with the first steps with the AUV. We expect to see their first results in the near future, as soon as the situation is stabilized in the UK.
National Oceanography Centre (NOC) is the United Kingdom’s centre of excellence for oceanographic sciences. Back in 2018, NOC team chose IQUA’s SPARUS II platform to become a test bed for new developments that may be later transferred to other vehicles in their fleet. The team picked this AUV for its versatility, its ROS driven software and its possibilities for sensors integration.
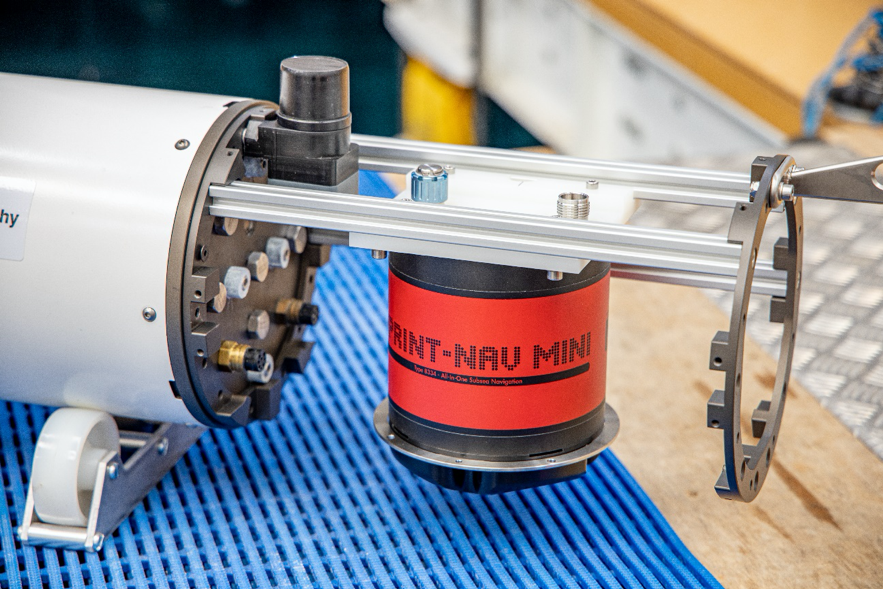
In this case, NOC team has closely worked with Sonardyne, a global provider of underwater acoustic, inertial, optical and sonar technology. As part of the launch activities for SPRINT-Nav Mini Sonardyne installed its 300 m-rated SPRINT-Nav Mini into IQUA robotics’ 9” SPARUS II AUV, which was on loan to Sonardyne from the National Oceanography Centre (NOC). The SPRINT-Nav Mini is the world’s smallest hybrid acoustic-inertial navigator, combining DVL, inertial and depth in a single all-in-one solution ideally suited for smaller subsea vehicles.
The vehicle is used as an embedded development test bed by the NOC and is permanently equipped with a Sonardyne AvTrak 6 OEM Nano, which is housed inside the main SPARUS II payload hull. The AvTrak 6 OEM Nano allows the NOC to efficiently and simultaneously track, send position updates and exchange data with the SPARUS II vehicle, using a Ranger 2 Ultra-Short BaseLine Positioning system and Sonardyne’s Marine Robotics pack.
The team at NOC regularly works with Sonardyne and IQUA to integrate systems into the robot operating system (ROS) architecture that is being rolled out across its fleet of AUVs. This has recently involved the integration of SPRINT-Nav, AvTrak 6 and a NORBIT WBMS-FLS into their vehicle control system.
Post developed in collaboration with National Oceanographic Centre and Sonardyne International.
One of the current users of our vehicles is GEOMAR Helmholtz Centre for Ocean Research Kiel, a world-wide leading institute of marine research based in Kiel (Germany). GEOMAR incorporated two Girona 500 vehicles to its high-performance infrastructure in underwater robotics, to be used in different research fields related to marine sciences.
Recently, the team did an expedition to the Aeolian Islands, a volcanological active area of special interest for the geoscientists located in the Tyrrhenian sea (southern west Italy). The German research ship FS ALKOR was used to test the two Girona 500 vehicles (ANTON and LUISE) along with the submersible JAGO in investigations around the Vulcano and Stromboli volcanoes.
The goal of the mission was to study an analyze the possibilities of cooperation between vehicles in different terrains, from flat areas to rocky slopes. The scenario was ideal to test the lighting system developed by GEOMAR and integrated in the payload area of the LUISE AUV. In total, 11 dives where performed with JAGO, ANTON and LUISE.
The payload that has been developed by GEOMAR AUV team for LUISE AUV is a camera system CoraMo Mark 2 and it contains an IDS machine vision camera with 12 MP. The team has also developed a forward-looking version prepared for a mid water ecology project to photograph animals in the water column.
The Intelligent Robotic Autonomy and Perception (IRAP) Lab at KAIST, leaded by Dr. Ayoung Kim, focuses on robotics problems in civil and environmental engineering applications. Their main research interest and topics include perception-based environment mapping, intelligent sensor fusion, decision making and control of the robotic agents, robotic operation and navigation in GPS-denied environments (e.g., underwater, indoor).
KAIST team chose SPARUS II to be their first platform to start with autonomous underwater robotics for its open approach (ROS driven and reconfigurable hardware). Their current work consist on the integration of a Teledyne Blueview M-900 in the AUV payload area for the obtention of underwater acoustic images with the goal of the detecting objects in the seafloor. In the integration process, KAIST researchers collaborated with Prof. Lee (Kongju University), Dr. Park (ETRI) and Korean Research Institute of Ships and Ocean Engineering (KRISO).
The Teledyne Blueview M-900 is a multibeam imaging sonar which is very compact, and allows an easy integration in SPARUS II payload area.
Our customer’s opinion: “The Sparus II is a very research-friendly platform, perfect for robotics students to get used to underwater robots. Integration and data collection were smooth due to the flexibility of the platform.”