
COLA2
COLA2 (Component Oriented Layer-based Architecture for Autonomy) is the ROS-based software architecture running in the underwater vehicles from Iqua Robotics.
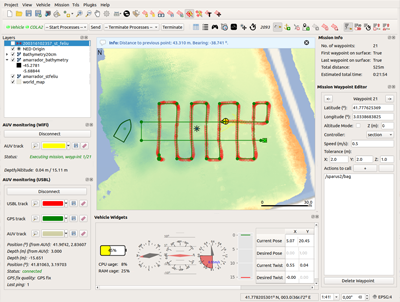
IQUAview
IQUAview is the graphical user interface (GUI) that allows to operate the family of vehicles from Iqua Robotics in a simple and user-friendly manner.

SoundTiles
SoundTiles is a stand-alone software to create acoustic maps using forward-looking sonar data.