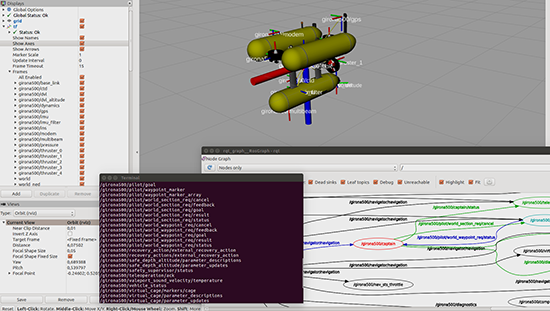
COLA2 (Component Oriented Layer-based Architecture for Autonomy) is the ROS-based software architecture running in the underwater vehicles from Iqua Robotics. It includes a full control stack, a localization module with a navigation filter, a set of safety-related nodes and all the necessary drivers to communicate with the available hardware. Thus, COLA2 endows Iqua vehicles with a complete software suite that turns them in fully operational AUVs. Besides, it also sets the basis for further development of more advanced functions.
Find more information and try it out in simulation from the COLA2 Wiki: COLA2 Wiki