The PLOME project has tested new technologies that will allow the deployment of stations and vehicles to monitor the marine environment and provide real-time data. The experiments have been conducted along the Catalan coast at depths of up to 350 meters. The project is led by the University of Girona, with participation from the UPC, the UIB, the UPM, the ICM-CSIC, and the company Iqua Robotics.
An oceanographic campaign has validated this past December a set of innovative technologies developed within the framework of a research project coordinated by the University of Girona (UdG) with the aim of improving the supervision, monitoring, and management of marine ecosystems. The campaign took place aboard the oceanographic vessel Sarmiento de Gamboa, of the CSIC, off the Catalan coast, at depths ranging from 70 to 350 meters.
The research project is called “Long-Term Platform for the Observation of Marine Ecosystems (PLOME)” and is comprised of six partners: the University of Girona (UdG), the Universitat Politècnica de Catalunya – BarcelonaTech (UPC), the University of Balearic Islands (UIB), the Polytechnic University of Madrid (UPM), the Institute of Marine Sciences (ICM-CSIC) and the company Iqua Robotics.
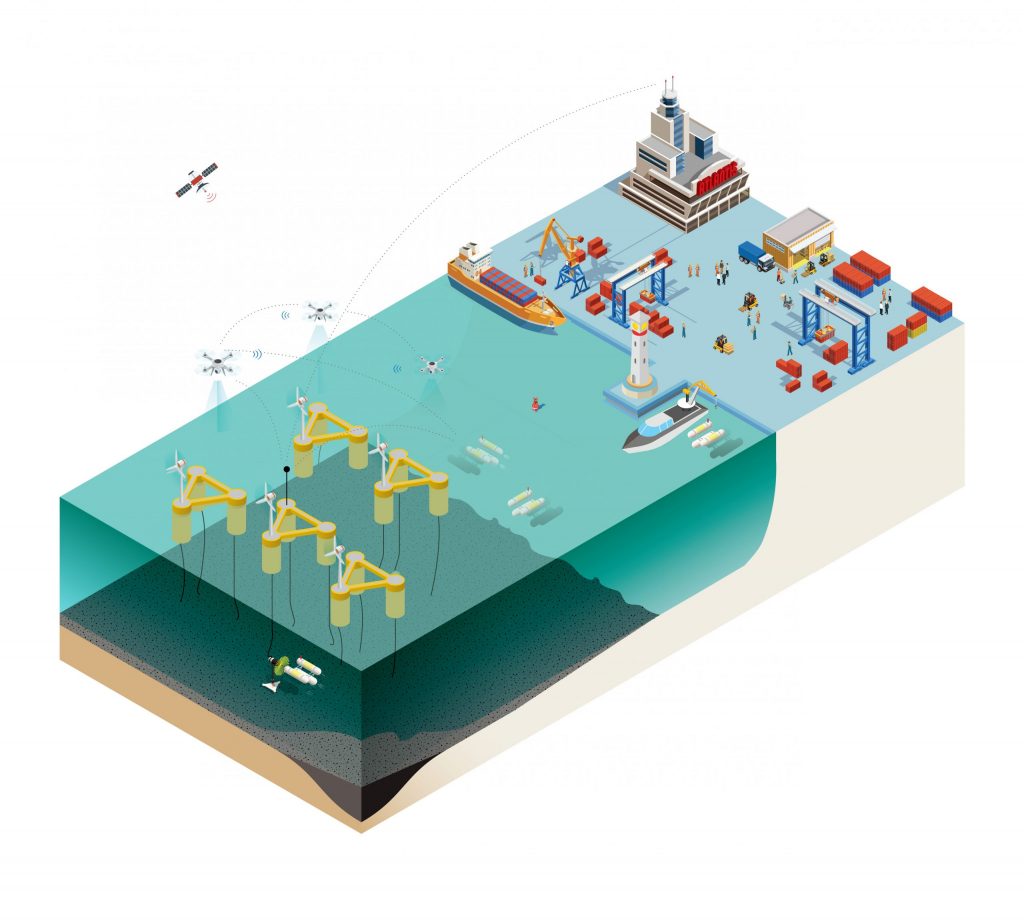
The PLOME project, funded by the Spanish Research Agency and Next Generation European funds, is working to develop a non-invasive and modular platform to gather essential data for the scientific community to supervise, monitor, and manage marine ecosystems more efficiently. So far, a set of independent systems has been developed, consisting of fixed stations that remain on the seafloor, underwater vehicles, and surface vehicles. These systems are equipped with batteries and wireless communication systems, and they work together autonomously to collect data.
Currently, data extraction can only be predominantly carried out when a human team conducts an oceanographic campaign. The project aims to advance this information gathering system. Thus, the PLOME platform allows remote monitoring without the need for human intervention once the systems have been deployed on the seafloor, over a period of several weeks, with real-time communications facilitating ecosystem tracking.
During the December campaign, two fixed stations, two underwater vehicles, and a surface buoy were deployed to transmit information, which served to validate the operation of the various technologies developed since the beginning of the project. The systems communicated correctly using acoustic modems to share data and optical communication to share images. The cameras, installed on each system, recorded data from the seafloor and simultaneously processed it using artificial intelligence techniques to detect the presence of individuals such as fish or crustaceans. New technologies for optical and acoustic mapping of the seafloor were also validated, allowing for the reconstruction of terrain or acoustic visualization to reduce the impact of artificial light in habitats where sunlight does not reach.
The test results were successful, and work is already underway on the next validation campaigns of the project. The next one will take place at OBSEA, the UPC’s cabled marine observatory located in Vilanova i la Geltrú. In this case, a fixed station will be installed with the capacity to contain an underwater vehicle that will daily carry out monitoring tasks and return to the station to recharge batteries and transmit information. The final campaign of the project will be carried out in 2025, once again aboard an oceanographic vessel, to validate the final development of the deep-sea monitoring platform.

Figure 1. Members of the oceanographic campaign in front of the Sarmiento de Gamboa ship in the port of Palamós.

Figure 2. UPC fixed stations prepared to be placed on the seabed.
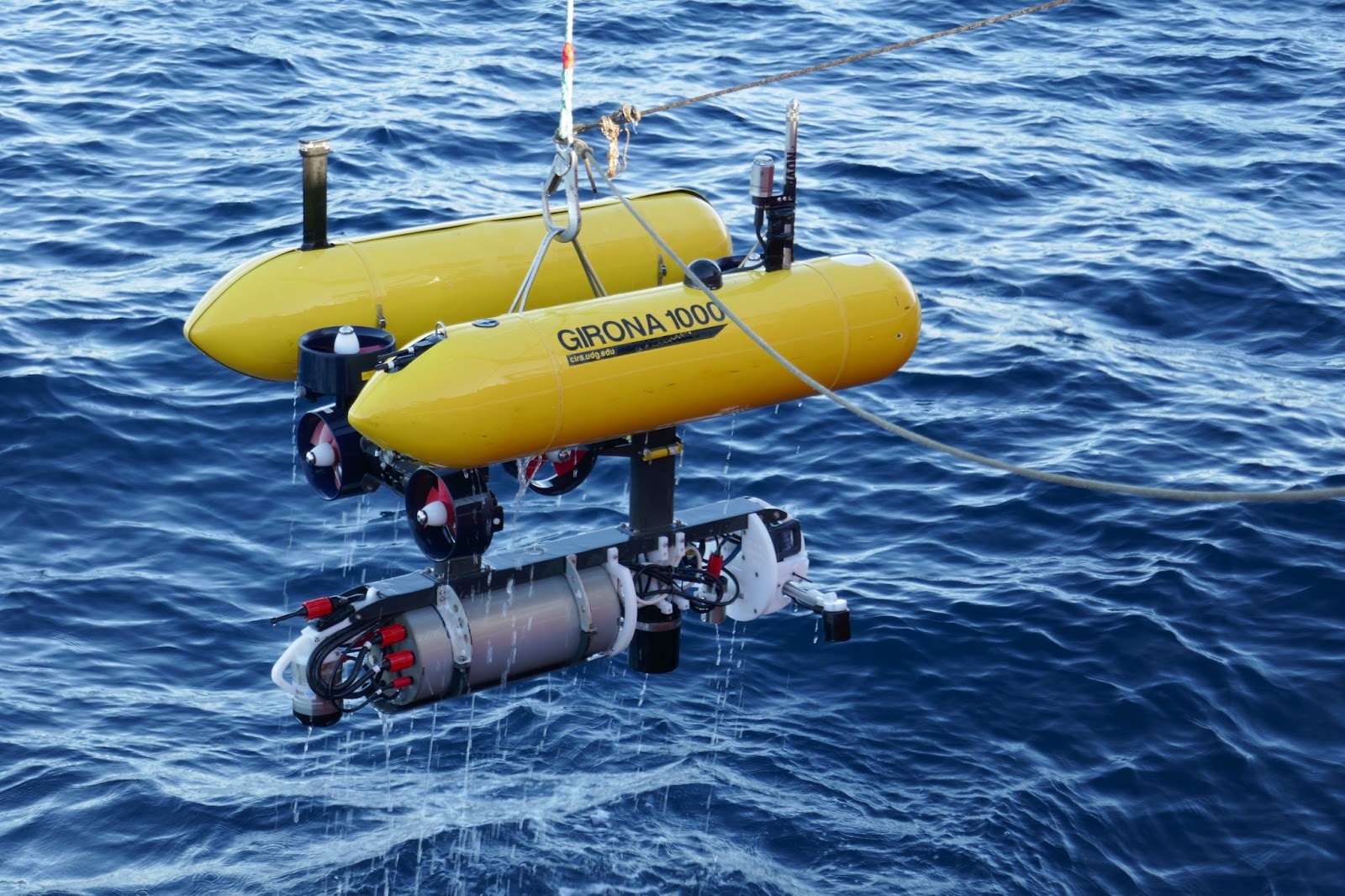
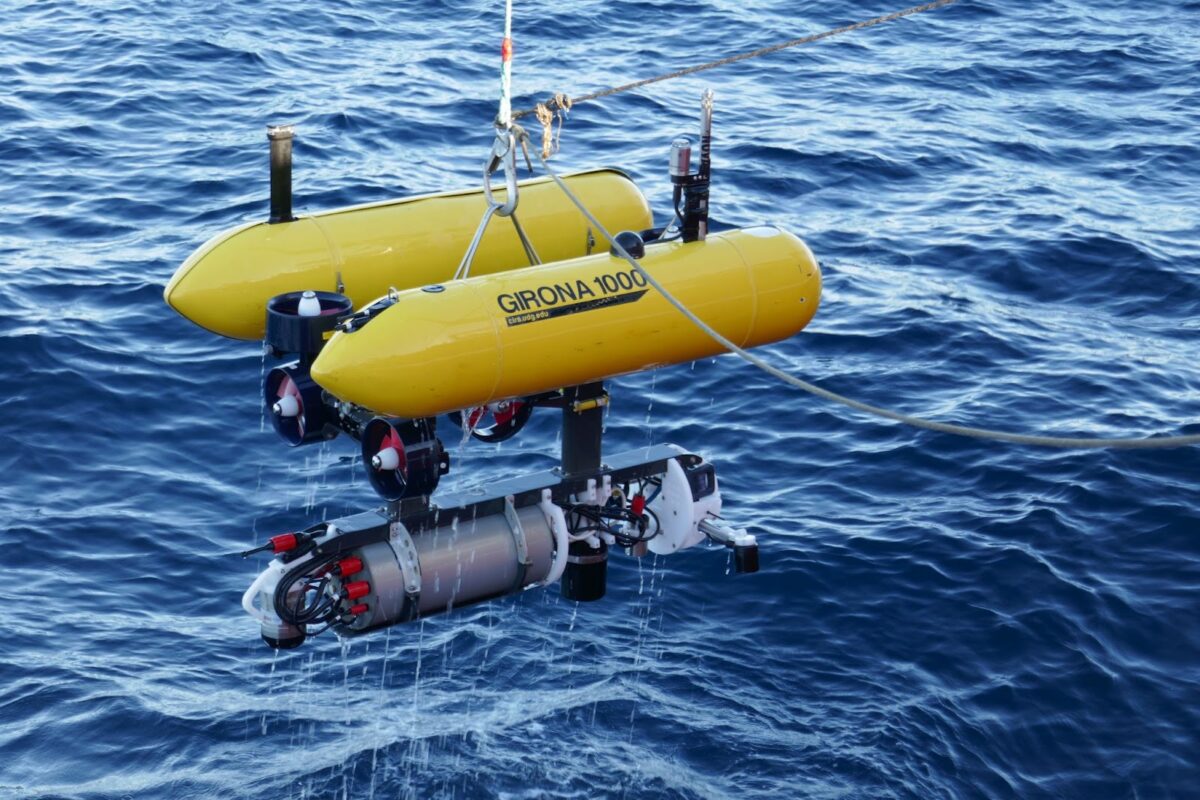
Figure 3. Recovery of the Girona 1000 autonomous underwater vehicle of the UdG.
Figure 4. PLOME project work team at the end of the campaign.

Ref. PLEC2021-007525/AEI/10.13039/501100011033