Considering the exceptionalism of the situation lived in our country due to COVID 19 proliferation, IQUA robotics decided to close its offices from last Friday the 13th of March 2020 until new orders. The team is currently working safely from home so, please feel free to contact any of our staff members by email. Let […]
Author: IQ_admin

ATLANTIS and EUROFLEETS+ H2020 projects meetings take place in Portugal
First semester of 2020 has been very active from the company’s research and development point of view. The team is currently working in two H2020 projects: ATLANTIS, an innovation action linked to ICT robotics programme, dealing with the potential autonomous operations and maintenance to be carried out in a floating wind farm; EUROFLEETS+, an infrastructure […]

We participate in Marine Autonomy and Technology Showcase 2019 in Southampton, UK
From 12 to 14th of November 2019 will take place at National Oceanography Centre (NOC) in Southampton (UK) the Marine Autonomy and Technology Showcase (MATS). The event gathers industry and academy in a networking environment at NOC facilities. Yearly organized, the event is getting popular among marine technology developers and end users and will, in […]

A spring of events in Provence: EMRA workshop in Toulon and IEEE Oceans in Marseille
Since its foundation in 2016, IQUA robotics has been a very active company in International initiatives taking place regularly in underwater robotics research world. This spring, the place to be was Provence, in Southern France, two very interesting meeting points of research in underwater robotics community occurred in just 1 month: European Marine Robotics and […]

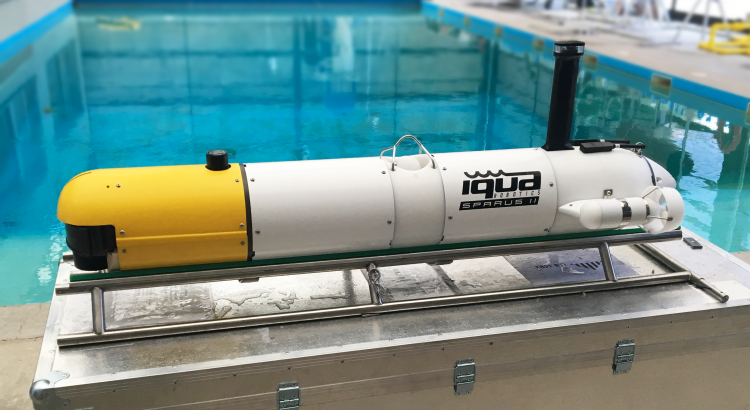
First scientific results of KAIST team with its SPARUS II AUV
Korea Advanced Institute of Science and Technology (KAIST), based in Daejeon (Korea), has chosen SPARUS II AUV to be its research platform. The Intelligent Robotic Autonomy and Perception (IRAP) Lab at KAIST, leaded by Dr. Ayoung Kim, focuses on robotics problems in civil and environmental engineering applications. Their main research interest and topics include perception-based environment […]

We participate in the H2020 Eurofleets Plus infrastructure project
EUROFLEETS+ is an H2020 project funded under the Infrastructures initiative, coordinated by the Marine Institute that brings together a significant group of key marine research actors (in particular research vessel operators) in Europe, North America and Oceania – 42 marine institutes, universities, foundations and SMEs from 24 countries (full list). The EUROFLEETS+ project will facilitate open free […]
IQUA robotics develops a dedicated payload for SPARUS II integrating NORBIT WBMS-FLS
The National Oceanography Centre (NOC), the United Kingdom’s centre of excellence for oceanographic sciences, works with SPARUS II as one of their software-testing platforms. One of the main features of IQUA’s platforms is that they have an open conception, both in terms of hardware (reconfigurable) and software (using ROS operating system). These characteristics brought the […]
Visit us at OCEAN BUSINESS in Southampton
From the 9th to the 11th of April 2019 you will meet us at Ocean Business in Southampton (UK). We will be delighted to receive you in booth V6! Floorplan Exhibitor list
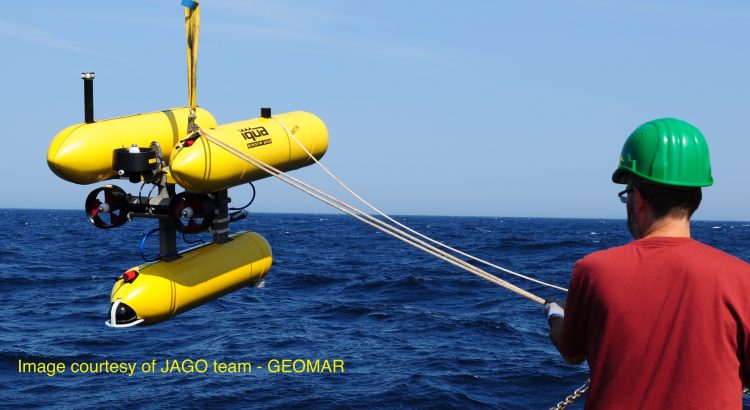
IQUA vehicles being used by reference research centres in Europe
Girona 500 and Sparus II are autonomous hovering vehicles that can be adapted by the end-user to a wide range of applications. This feature, together with their low weight, low requirements for its operation at sea and the added value of using ROS, convert them in a very interesting base platform for research centres that […]
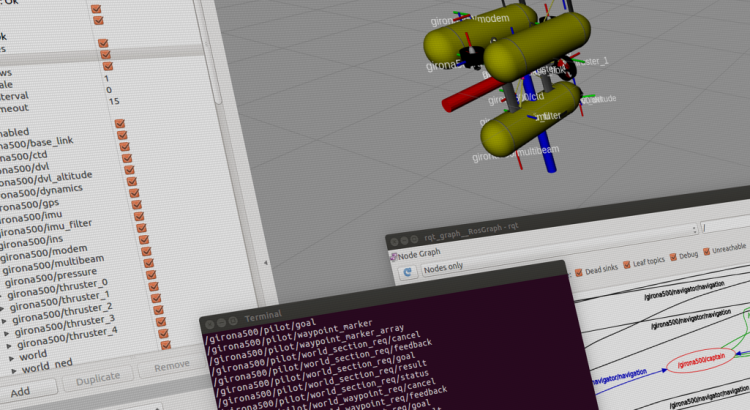
IQUA Robotics in the underwater ROS community
The vehicles from Iqua Robotics have at its core an open software architecture based on the robot operating system (ROS), named component oriented layer-based architecture for autonomy (COLA2). The use of a ROS-based software architecture is particularly advantageous from a developer perspective and it simplifies the creation and the addition of new components, thus enabling to […]