Back in 2016, when IQUA robotics was created, University of Haifa SubSEA Engineering lab and the VISEAON Marine Imaging lab decided to acquire a Sparus II AUV. By then, the research interest and goal of the team was to work on the development of underwater marine technologies.
Part of the team, led by Morel Groper, wanted to work on dynamics, maneuvering and propulsion of underwater vehicles. And, another part of the team, led by Tali Treibitz, were willing to do research on underwater imaging and underwater computer vision. To make this happen an underwater marine platform was required. As developing a platform from scratch could take a long time, they chose to purchase a platform off the shelf tailored to their requirements.
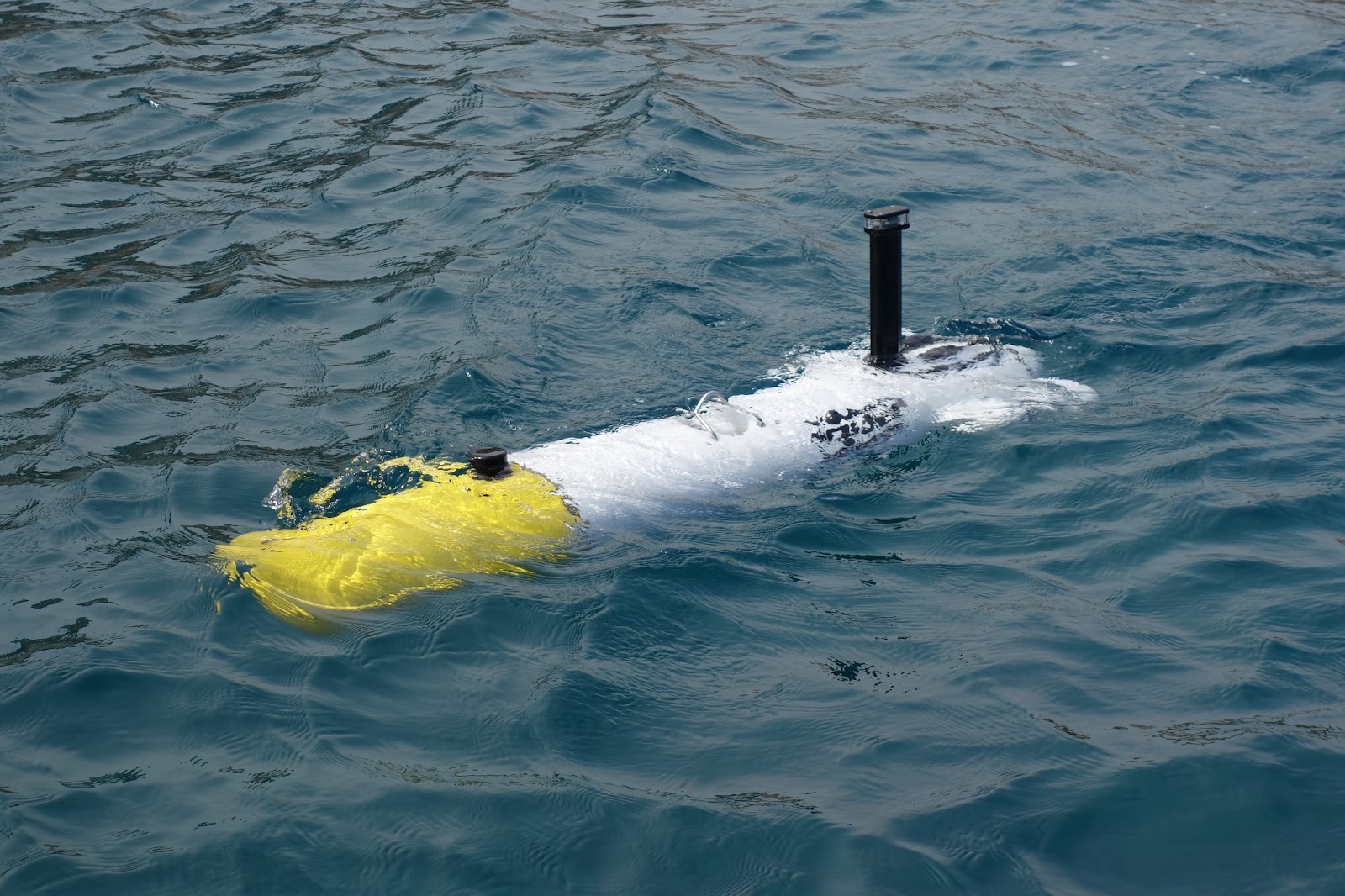
Image 1. SPARUS II AUV Alice first sea trials in Girona (Spain). ©IQUA robotics
“Sparus II was selected for several reasons: first, in order to develop technology and integrate it, a fully open-source vehicle platform, both hardware and software were necessary. Based on my previous experience, commercial platforms do not provide open source and it is nearly impossible to integrate new, self-developed technologies into them. Secondly, by purchasing from a company that was created from an academic lab, we assumed our requirements and needs would be better understood. And, finally, our goal was to find a two-man portable light platform that would let us conduct experiments more easily without needing a large, expensive surface support platform” says Mr. Groper when asked about the decision of purchasing Sparus II platform.
It is important to realize, however, that working with new technologies requires adaptation, as the University of Haifa team was not only willing to operate Sparus II but also to adapt it to their research needs. “This adaptation was easier with IQUA support and specifically, the personal relationships that both engineering teams, from Haifa and IQUA established. By establishing direct dialogue routes, we were able to use the vehicle for the projects we desired.”
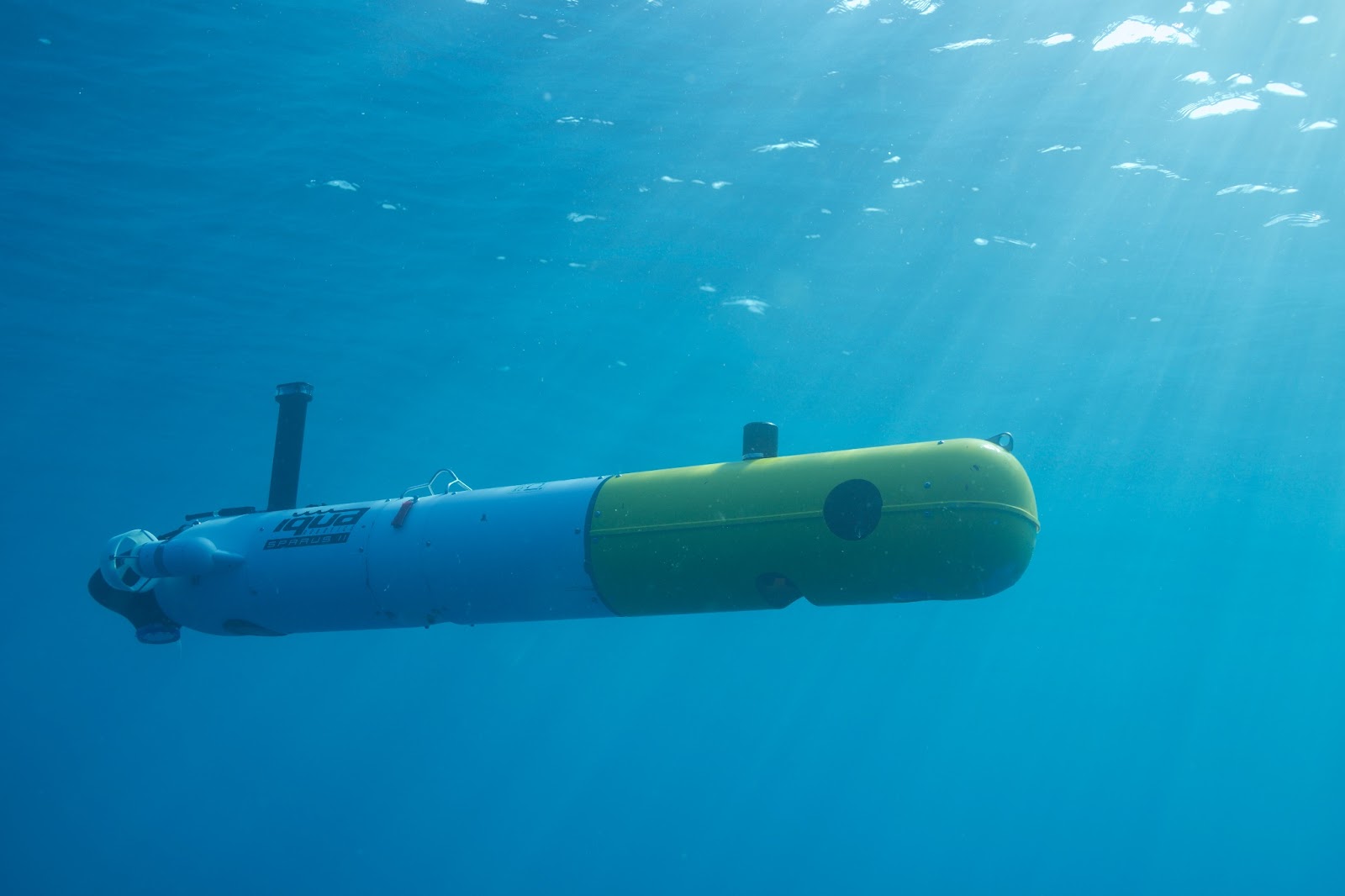
Image 2. SPARUS II AUV Alice with the modifications performed by the Haifa University team. © Matan Yuval – Haifa University
ALICE, the name that is used locally to name University of Haifa’s Sparus II, is a key member of the research lab, having greatly benefited the team’s capabilities in underwater marine technologies. “ALICE is a platform suitable for research and development, specifically for self-developed technology. It possesses significant engineering abilities. We would only wish that she was slightly smaller for easier operation and lower costs.” The reconfigurable capabilities of IQUA’s vehicles are highly valued by the customers of the scientific community since they can perform their research building upon an already reliable technology.
But, which are the main changes that the Haifa team has performed on Alice? “A significant number of technologies were developed and embedded into ALICE. For high resolution 3D seabed surveys a dedicated imaging payload was developed. As demanded for visual surveys in confined spaces, the propulsion system was enhanced by the addition of two thrusters to allow sway and uncoupled yaw motions. As part of the EU project DeeperSense a novel payload combining a forward looking camera and a forward looking sonar is currently developed. In the future, we plan to keep using ALICE to develop additional technologies, test concepts and promote our research.”
This has been the use case of ALICE, the eldest Sparus II AUV manufactured by IQUA, a very special AUV that started its journey back in 2017 and that has already boosted University of Haifa’s underwater marine technologies development.

Image 3. Forward looking payload developed for SPARUS II AUV Alice integrating a camera system and a Teledyne BlueView Forward Looking Sonar. © Matan Yuval – Haifa University