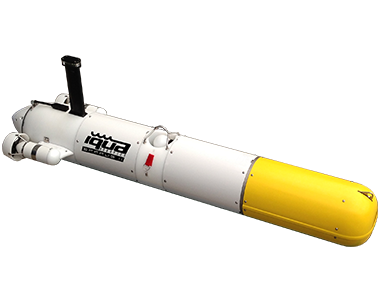
Lightweight autonomous underwater vehicle for a maximum depth of 200m. Like the Girona 500, the Sparus II is also capable of hovering and has an easily configurable payload area and an open software architecture.
SPARUS II AUV is a lightweight hovering vehicle with mission-specific payload area and efficient hydrodynamics for long autonomy in shallow water (200 meters). It combines torpedo-shape performance with hovering capability. It is easy to deploy and to operate. The payload area can be customized by the end user and it uses an open software architecture, based on ROS, for mission programming. Its flexibility, easy operation and openness makes the SPARUS II AUV a multipurpose platform that can adapt to industrial, scientific and academic applications.
• Torpedo-shaped for efficient hydrodynamics and better autonomy
• Hovering capable, high maneuverability
• Lightweight
• Easy operation. It can be deployed by 2 people from any boat
• Open hardware for easy payload integration
• ROS-based software architecture
• Low cost
• Torpedo-shaped for efficient hydrodynamics and better autonomy
• Hovering capable, high maneuverability
• Lightweight
• Easy operation. It can be deployed by 2 people from any boat
• Open hardware for easy payload integration
• ROS-based software architecture
• Low cost
| Length: | 1.6 m |
| Hull diameter: | 0.23 m |
| Max width: | 0.46 m |
| Weight in air: | 52 kg |
| Maximum depth: | 200 m |
| Energy: | 1.9 kWh Li-Ion battery system |
| Endurance: | 8-10hrs (Dependent on configuration) |
| Max surge velocity: | 3 knots |
| Propulsion system: | 3 thrusters |
| DoFs: | Surge, heave, pitch and yaw |
| Power on: | Magnetic switch |
| Structure: | Modular aluminium and acetal hull |
| Software: | ROS over Linux Ubuntu |
| Communication: | WiFi and Ethernet umbilical |
| Navigation: | IMU, DVL, pressure sensor, GPS |
| Safety: | Flashing light |
| Payload volume: | 8 liters (7 kg in air) |
| Payload interface: | Ethernet, RS-232, regulated 12V and 24V |